4.3.2 Replacement of cable harness, axes 4-6
Location of cable harness
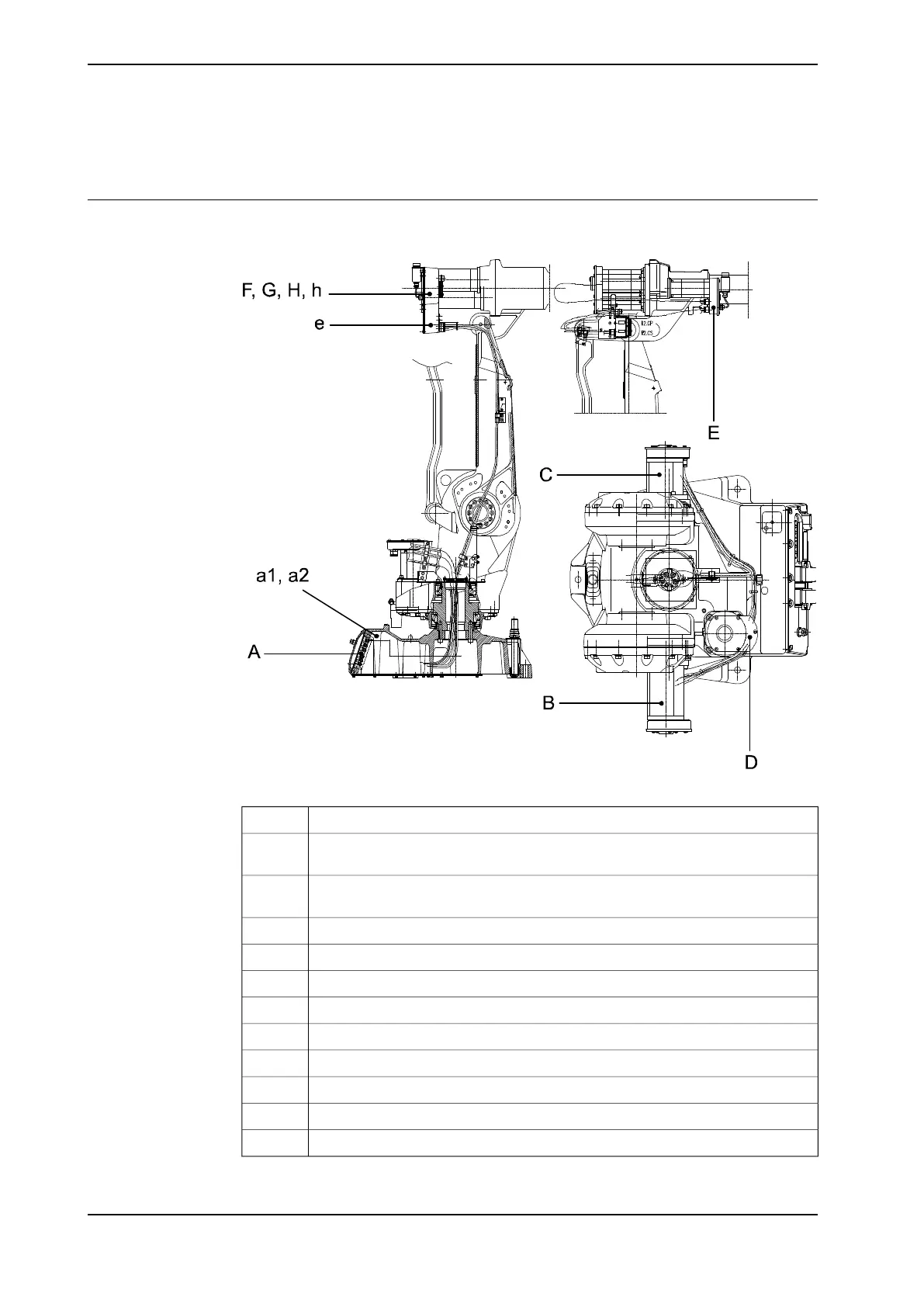
The cable harness runs throughout the robot as shown in the figure below.
xx0200000396
Connector at robot base, R1.MP, R1.SMB and R1.C/CSA
Electrical connectors rear of the cover plate at the robot base , R1.MP1-3,
R1.MP4-6, R1.CS, R1.CP, R1.H1, R2.BU, R2.BU1-3, R2.BU4-6,
a1
Connectors at the serial measurement board (SMB-unit), R2.SMB1-2 (empty),
R2.G (bat), R2.FB1-3 and R2.FB4-6
a2
Connectors at motor 2, R3.MP2 and R3.FB2B
Connectors at motor 3, R3.MP3, R3.FB3,R3.LS1 and R3.LS2C
Connectors at motor 1, R3.MP1, R3.FB1D
Connectors at motor 4 (5 kg option), R3.MP4 and R3.FB4E
Connectors at motor 4 (15 kg option), R3.MP4 and R3.FB4e
Connectors at motor 5, R3.MP5 and R3.FB5F
Connectors at motor 6, R3.MP6 and R3.FB6G
Connectors R3.H1 and R3.H2 (5 kg option)H
Connectors R3.H1 and R3.H2 (15 kg option)h
Continues on next page
126 Product manual - IRB 2400
3HAC022031-001 Revision: P
© Copyright 2004-2018 ABB. All rights reserved.
4 Repair
4.3.2 Replacement of cable harness, axes 4-6
 Loading...
Loading...







