2-208 Torque Reference
Flux Vector Control
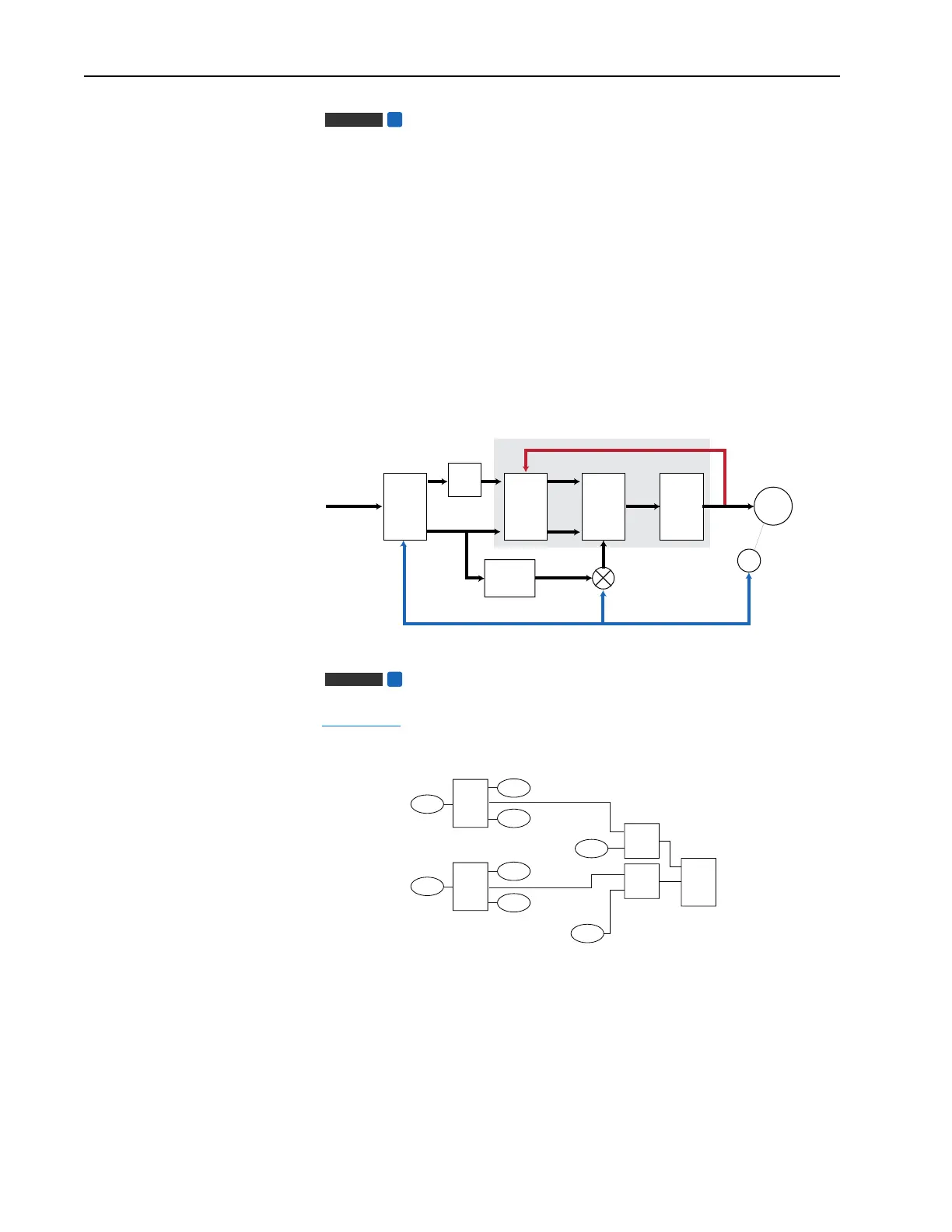
The drive takes the speed reference that is specified by the Speed Reference
Selection Block and compares it to the speed feedback. The speed regulator
uses Proportional and Integral gains to adjust the torque reference for the
motor. This torque reference attempts to operate the motor at the specified
speed. The torque reference is then converted to the torque producing
component of the motor current. This type of speed regulator produces a
high bandwidth response to speed command and load changes.
In flux vector control, the flux and torque producing currents are indepently
controlled. Therefore, we can send a torque reference directly instead of a
speed reference. The independent flux control also allows us to reduce the
flux in order to run above base motor speed.
Figure 2.41 Flux Vector
Torque Reference When the PowerFlex 700 Vector Control drive is operated in
Torque mode, an external signal is used for a Torque reference. Refer to
Figure 2.42
.
Figure 2.42
Torque Reference Input
[Torque Ref A], parameter 427 is used to supply an external reference for
how much torque is desired. The scaling of this parameter is from –800 to
+800, via [Torq Ref A Hi] and [Torq Ref A Lo].
Torque Ref 1 is then divided by [Torq Ref A Div], parameter 430. This
defines the scaled Torque Ref A.
Vector
FV
Adaptive
Controller
High Bandwidth Current Regulator
SPEED REF.
TORQUE REF.
SLIP
SPEED FEEDBACK
CURRENT FEEDBACK
AUTOTUNE PARAMETERS
V mag
V ang
Current
Reg.
Speed
Reg.
Flux
Reg.
Voltage
Control
Inverter Motor
Encoder
Vector
FV
431
Scale
Scale
433
432
429
428
434
430
/
x
+
Ref A Hi
Ref A Lo
Ref B Hi
Torq Ref A Div
Torq Ref B Mult
Ref B Lo
Torque Ref B Sel
427
Torque Ref A Sel

 Loading...
Loading...










