Chapter 12 Descriptions of Parameter SettingsC2000 Plus
12.1-07-2
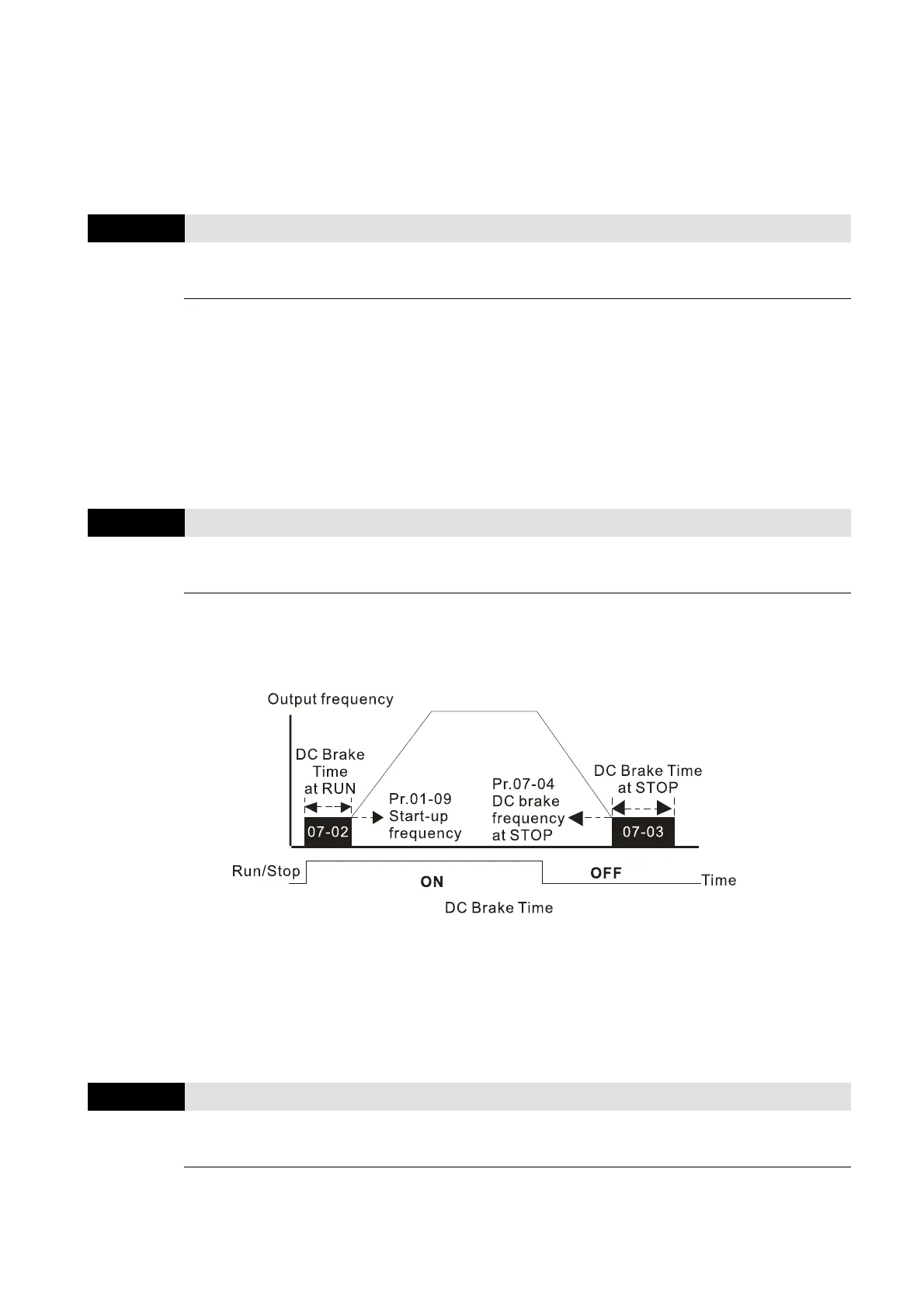
the duration of the DC brake current output to the motor when the drive starts up. Setting this
parameter to 0.0 disables the DC brake at start-up.
The PM has the magnetic field itself, using the DC brake may possibly cause the motor run in a
reverse direction, therefore, it is not recommended to use DC brake for PM. Use Pr.10-49 zero
voltage command to force the motor decelerate or to stop.
07-03
DC Brake Time at STOP
Default: 0.0
Settings 0.0–60.0 sec.
The motor may continue rotating after the drive stops output due to external forces or the inertia
of the motor itself. This parameter outputs DC current, generating torque to force the drive stop
after the drive stops output to make sure that the motor stops.
This parameter determines the duration of the DC brake current output to the motor when braking.
To enable the DC brake at STOP, you must set Pr.00-22 (Stop Method) to 0 (ramp to stop). Set
this parameter to 0.0 to disable the DC brake at stop .
Related parameters: Pr.00-22 Stop Method, Pr.07-04 DC Brake Frequency at STOP.
07-04
DC Brake Frequency at STOP
Default: 0.00
Settings 0.00–599.00 Hz
Determine the start frequency of the DC brake before the drive ramps to stop. When this setting
is less than Pr.01-09 (Start-up Frequency), the start frequency for the DC brake begins at the
minimum frequency.
Use the DC brake before running the motor when the load is movable at stop, such as with fans
and pumps. The motor is in free running status and in unknown rotation direction before the drive
starts up. Execute the DC brake before you start the motor.
Use the DC Brake at STOP when you need to brake the motor quickly or to control the positioning,
such as with cranes or cutting machines.
07-05
Voltage Increasing Gain
Default: 100
Settings 1–200%
When using speed tracking, adjust Pr.07-05 to slow down the increasing voltage gain if there are
errors such as oL or oc; however, the speed tracking time will be longer.
 Loading...
Loading...



