Maintenance 14. Calibration
G10 / G20 Rev.20 221
14.2 Calibration Procedure
EPSON RC+ has a wizard for calibration.
This section indicates the calibration using the calibration wizard of EPSON RC+.
You can also calibrate with TP1 in TEACH mode. For details, refer to RC180/RC90
option Teach pendant TP1 manual Operation: 2.7 Calibrating Origin : E2 Series / G
Series / RS series.
The same calibration procedure is used for each joint.
The steps below are calibration using Joint #1. Follow the steps below to calibrate other
joints.
When coordinates for the Manipulator working point require calculation, it is important
for Joint #2 to be calibrated accurately. Execute the procedure in “Calibration Using
Right / Left Arm Orientations” to accurately calibrate Joint #2. For details, refer to
Maintenance: 14.3 Accurate Calibration of Joint #2.
When calibrating Joint #4, you must calibrate Joint #3 and #4 at the same time. You
cannot calibrate Joint #4 alone because of the structure of the Manipulator.
If Err9716 or 5016 (Power supply failure of the absolute encoder. Replace the battery.
Check the robot internal wiring) occurs, apply the procedure of Maintenance: 14.4
Calibration Procedure without using Calibration Wizard - 3. Encoder Initialization and
then, start the calibration wizard.
The reference point (a point to check the accuracy) needs to be specified for calibration.
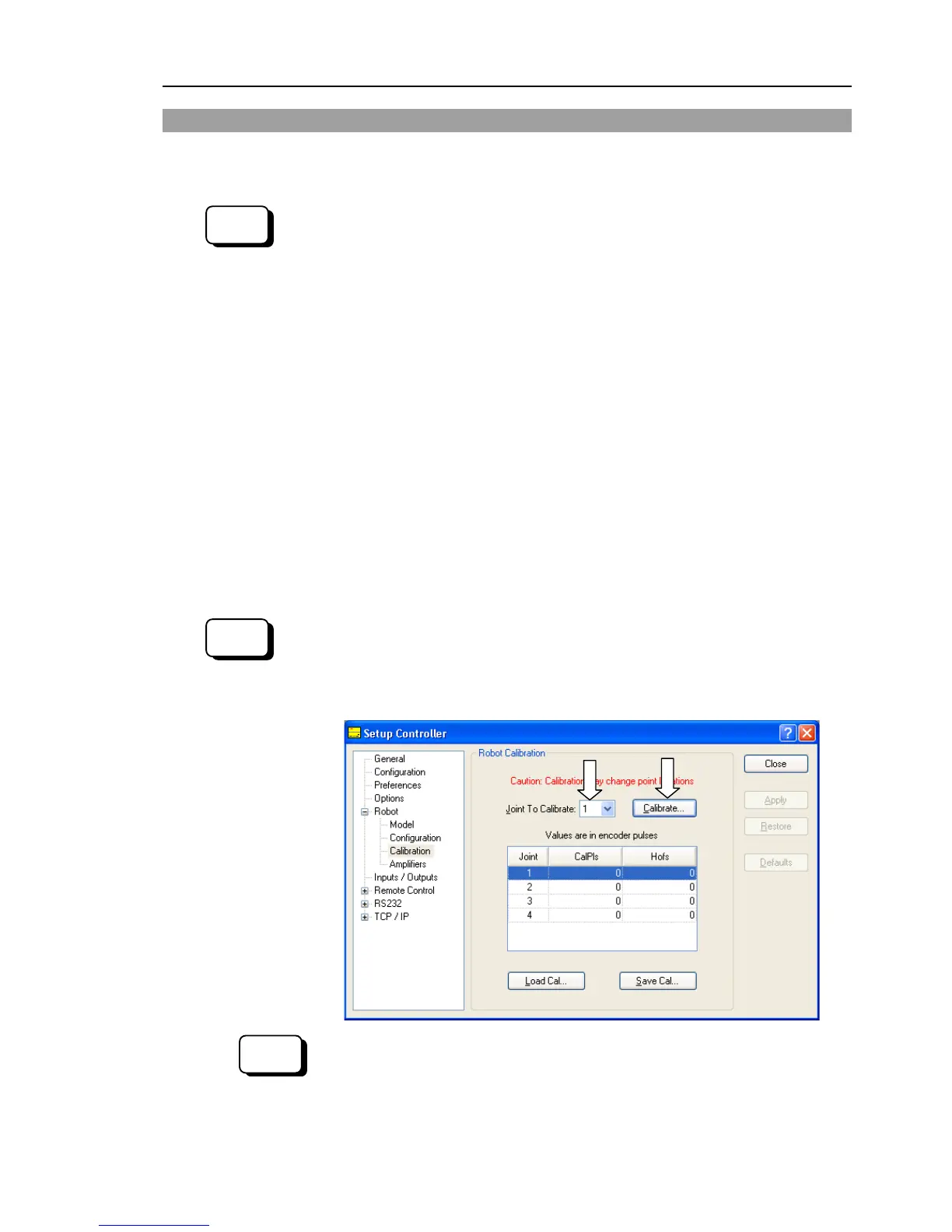
(1) Start the calibration wizard.
i. Select EPSON RC+ menu-[Setup]-[Controller] to display the [Controller]
dialog.
ii. Select [Robot]-[Calibration] to display [Robot Calibration].
iii. Select the joint and click the <Calibrate…> button.
 Loading...
Loading...







