7. Interfaces and Communication
- 212 -
7
Ƶ
Use of AO Terminals
The drive supports a maximum of two analog output terminals. AO1 is on the control board and
AO2 is on the optional extension card.
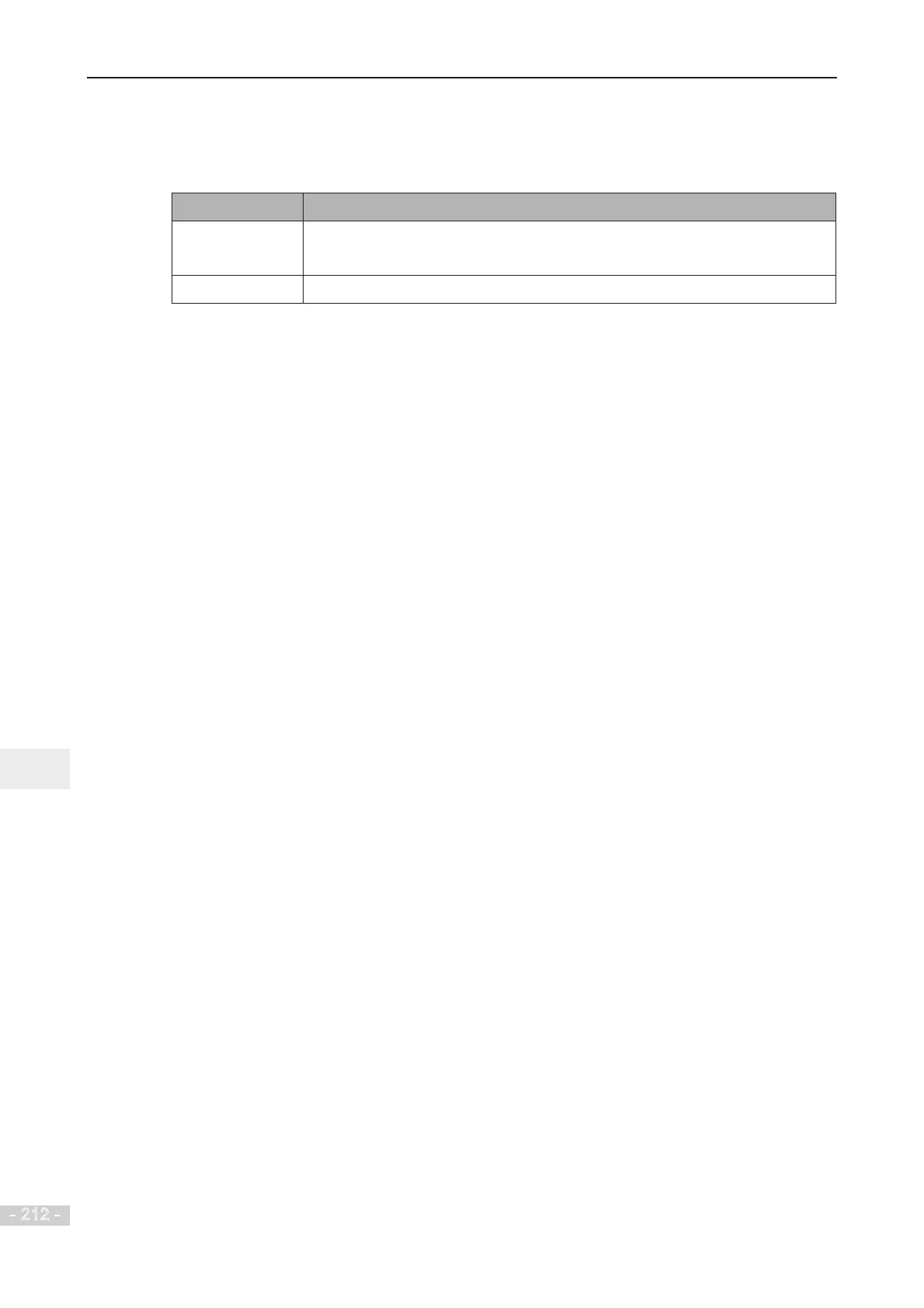
Terminal Input Signal Characteristic
AO1-GND
If J5 jumps to the "V" position, AO outputs voltage signal of 0 to 10 VDC.
If J5 jumps to the "I" position, AO outputs current signal of 0 to 20 mA.
AO2-GND It outputs voltage signal of 0 to 10 VDC.
F5-07 and F5-08 define how AO terminals indicate the drive internal running parameters in
analog mode.
It is possible to change sense, offset and scaling of parameters on analog outputs. This is by
correcting outputs according to the following formula:
Y = kX + b,
Where:
Ɣ
Y = output parameter after correction.
Ɣ
X = output parameter before correction.
Ɣ
k = scaling factor set by F5-11.
Ɣ
b = offset set by F5-10.
Note that scaling and offset values can be positive or negative.
7.2 Serial Communication
You must install relevant extension card in the drive and set F0-28 correctly before you can use one of
available serial communication protocols. The available serial communication protocols are:
Ɣ
RS485
Ɣ
PROFIBUS-DP
Ɣ
CANopen
Ɣ
CANlink
Note that function code F0-28 has correct value for the CANlink communication protocol by default.
See
7
.
5
.
5
G
r
o
u
p
F
d
C
o
m
m
u
n
i
c
a
t
i
o
n
P
a
r
a
m
e
t
e
r
D
e
s
c
r
i
p
t
i
o
n
for instructions to set hardware
communication parameters for the relevant communication protocol. You must set identical
communication rate and data format for the drive and for the host computer, otherwise, communications
will fail.
The drive supports Modbus-RTU slave communication protocol, which has the following functions:
Ɣ
View and modify the parameters.
Ɣ
View various running status parameters.
Ɣ
Send Run command and frequency reference to the AC Drive from host computer.
The drive arranges parameters, running status parameters and run commands by using register
SDUDPHWHUDGGUHVVPRGH+RVWFRPSXWHUGH¿QHVSURWRFRORIFRPPXQLFDWLRQGDWDLQWHUDFWLRQ
 Loading...
Loading...
