S94P01C -e1
44
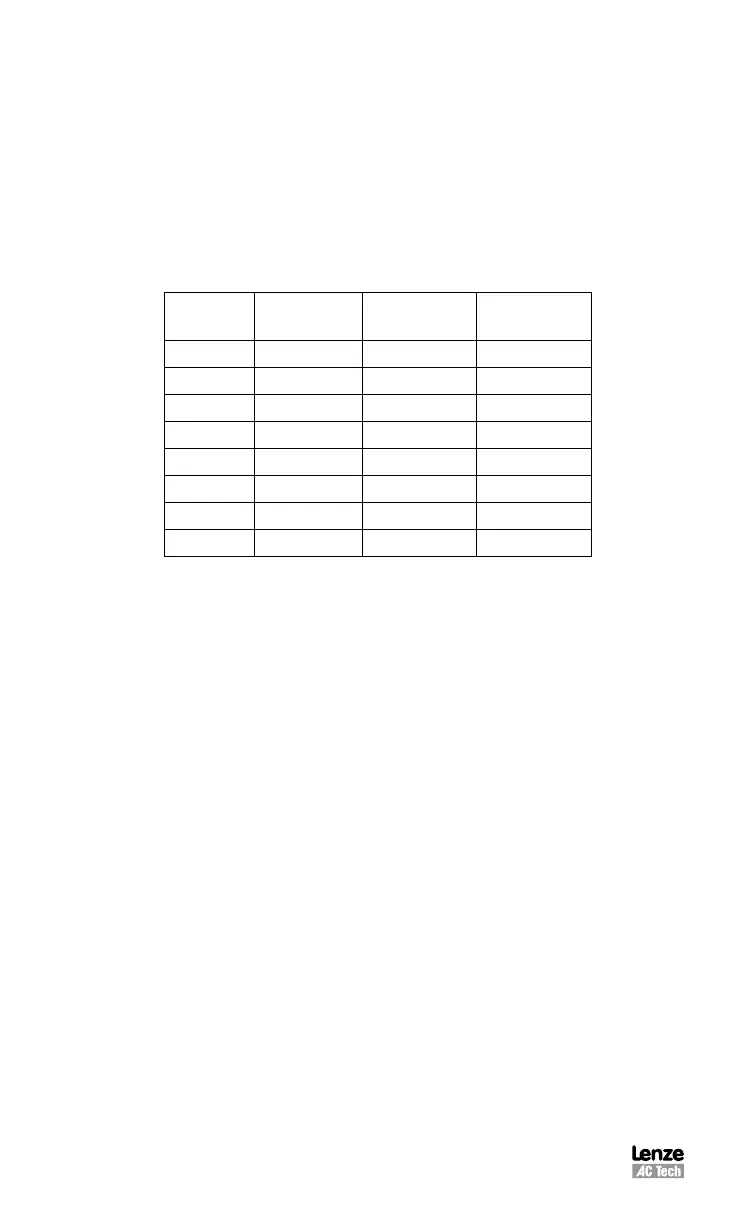
6.3.22 Resolver Track
The Resolver Track parameter is used in conjunction with the resolver motors and
Buffered Encoder Outputs, (Ref Section 5.2.2). If a motor with resolver feedback is
being used a simulated encoder feedback is transmitted out the Buffered Encoder
Outputs, P3.7 to P3.12. The default resolution of this feedback is 1024 pulses per
revolution, pre quad. If a different resolution is required then the Resolver Track
parameter is utilized. The number entered into this field, 0-15, directly correlates to a
different encoder resolution. Please reference the table below.
Resolver Track Conguration
Resolver
Track
Resolution
Before Quad
Resolver
Track
Resolution
Before Quad
0 1024 8 1000
1 256 9 1024
2 360 10 2000
3 400 11 2048
4 500 12 2500
5 512 13 2880
6 720 14 250
7 800 15 4096
6.3.23 Current Limit Max Overwrite
If this parameter is set to “Disable”, the parameters “Current limit”, “8 kHz peak current
limit” and “16 kHz peak current limit” cannot be overwritten. If you want to overwrite
the above three current limit parameters, this parameter must be set as “Enable”. To
prevent the motor from overloading, the “current Limit”, “8 kHz peak current limit” and
“16 kHz peak current limit” shall be set to values no higher than the corresponding
current limits of the motor in use. Note that this parameter applies to firmware version
(3.06) or higher.
6.4 Communication
6.4.1 Ethernet Interface
Programming and diagnostics of the PositionServo drive are done over the standard
10/100 Mbps Ethernet communication port. All devices on an Ethernet network have
an IP address. Before connecting MotionView software to the PositionServo drive, set
up the IP address of the drive and configure the PC as well.
The IP address of the PositionServo drive is composed of four sub-octets that are
separated by three dots. This conforms to the Class C Subnet structure. The sub-
octets IP_1, IP_2, IP_3 and IP_4 can be found by using “UP” and “DOWN” buttons of
the LED panel and are organized in the following order:
IP_1.IP_2.IP_3.IP_4
where each sub-octet IP_x can be any number between 1-254. On the LED
display, only IP_4 can be changed. IP_1, IP_2 and IP_3 can be changed once the
PositionServo drive is connected to the MotionView software. As shipped from the
factory the default IP address is 192.168.124.120.
 Loading...
Loading...


