S94P01C -e1
56
8.2 Conguration of the PositionServo
Regardless of the mode in which you wish to operate, you must first configure the
PositionServo for your particular motor, mode of operation, and additional features if
used.
Drive configuration consists of following steps:
• Motor Selection
• Mode of operation selection
• Reference source selection (Very Important)
• Drive parameters (i.e. current limit, acceleration / deceleration) setup
• Operational limits (velocity or position limits) setup
• Input / Output (I/O) setup
• Velocity / position compensator (gains) setup
• Optionally store drive settings in a PC file and exit the MotionView program.
To congure drive:
1.
Ensure that the control is properly installed and mounted. Refer to Section 4
for installation instructions.
2.
Perform wiring to the motor and external equipment suitable for desired
operating mode and your system requirements.
3. Connect the Ethernet port P2 on the drive to your PC Ethernet port. If
connecting directly to the drive from the PC, a crossover cable is required.
4. Make sure that the drive is disabled.
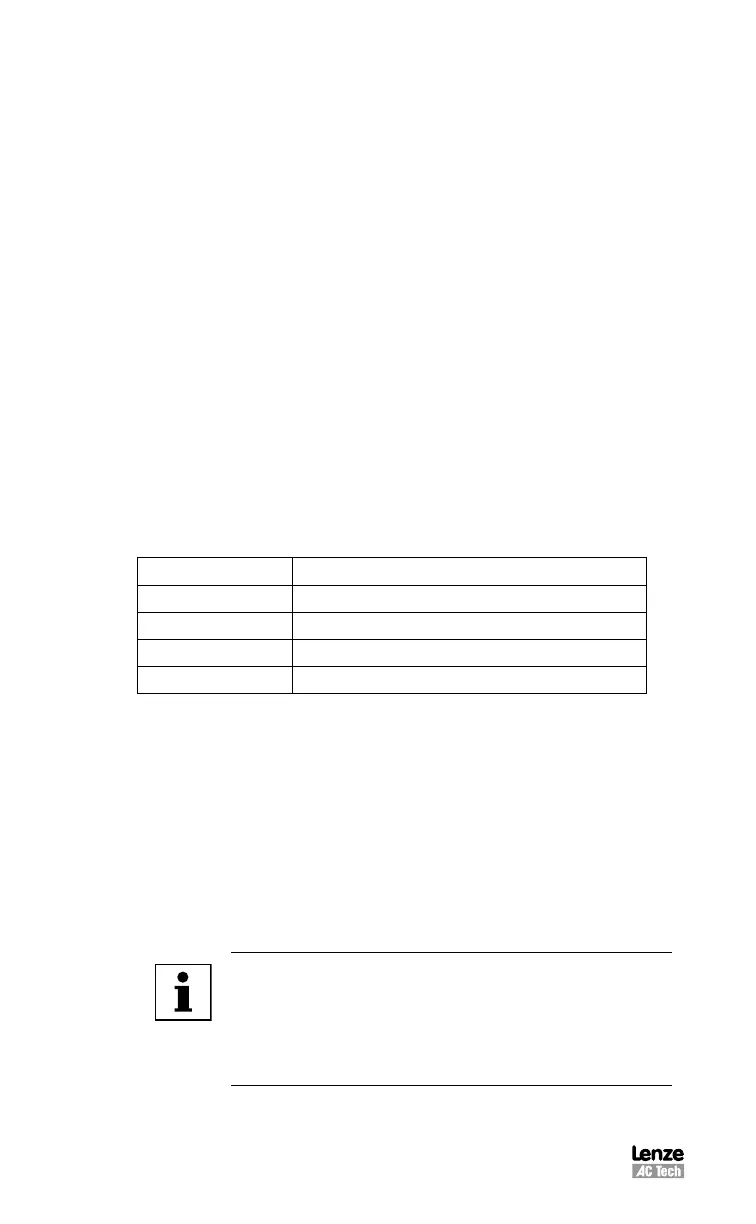
5. Apply power to the drive and wait until “
diS” shows on the display. For
anything other than this, refer to the chart below before proceeding.
Drive display: Meaning
-EP-
EPM missing. Refer to 6.1.2
EPM
EPM data. Refer to 6.1.2
- - - - No valid firmware
- - - -
Monitor mode
6. Confirm that the PC and the drive have the correct IP setting. Refer to
Section 6.4.1.1 - Setting Your PC IP Address.
7. Launch MotionView software on your computer.
8. From the MotionView menu, select <Project> <Connection setup>.
9. Select “Ethernet UDP”, then click the OK button.
10. From the MotionView menu, select <Node> <Connect Drive>.
11. Click the Discover button to ping the network for any drives. If a drive
is located the address will appear on the screen. If no address appears
then you can type the IP address in. The default address for the drive is
192.168.124.120. Click the Connect button to connect to the drive.
12. Once MotionView connects to the drive, its node icon will appear in the upper
left-hand corner of the Parameter Tree Window. Refer to the PositionServo
Programming Manual for more details.
Note
MotionView’s “Connection setup” properties need only be
configured the first time MotionView is operated or if the
port connection is changed. Refer to MotionView User’s
Manual for details on how to make a connection to the
drive.
13.
Double-click on the drive’s icon to expand parameter group’s folders.
14. Select the motor to be used according to the Section 5.5.
 Loading...
Loading...


