S94P01C -e1
67
9.2 Motor Response to Gain Settings (position mode)
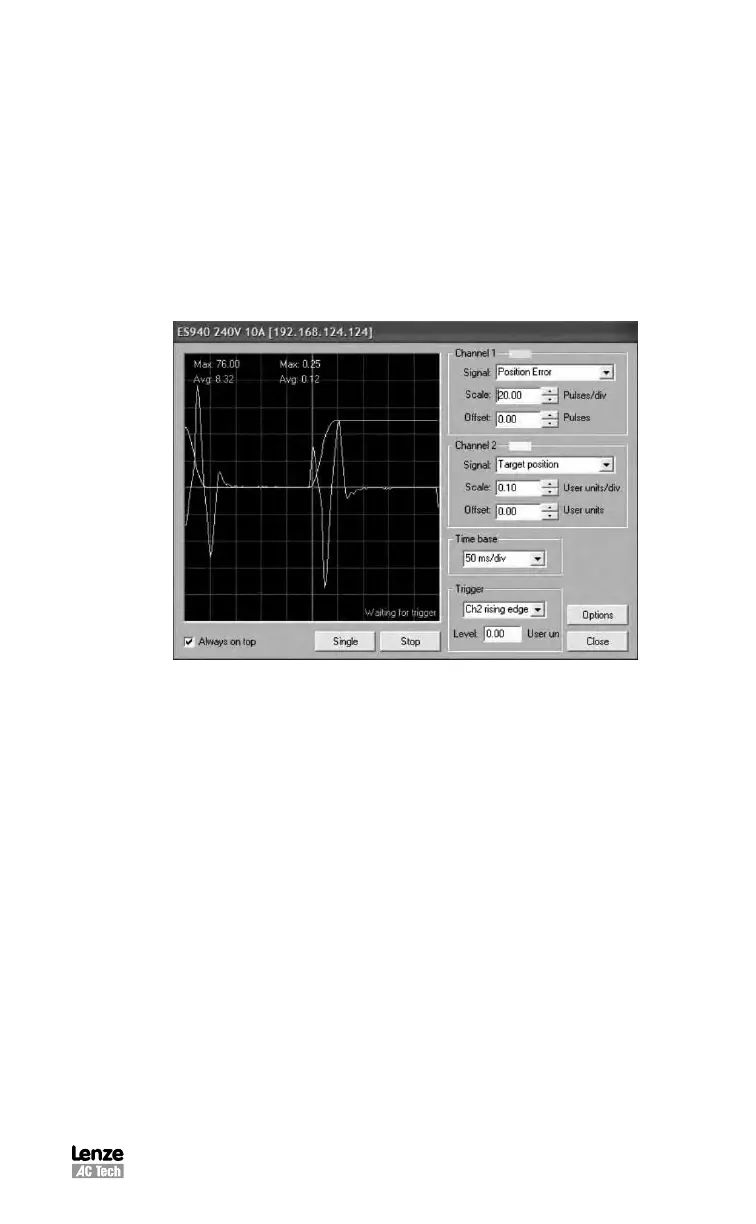
9.2.1 P-gain selection
Position P-gain = 2500
Position D-gain = 0
Position I-gain = 0
Position I-limit = 0
Problem: Insufficient P-gain can cause large position error as motor
changing position rapidly
Treatment: Increase P-gain.
Side effects: I
ncreasing the P-gain might cause oscillations and might require
an increase of the D-gain as well to overcome this problem.
S942
P-gain increase
Position P-gain = 8700
Position D-gain = 0
Position I-gain = 0
Position I-limit = 0
Positive effect: Position error decreased
Problem: Noticeable oscillation (Channel 1). P-gain can’t be set any
higher due to increasing oscillation, (instability).
Treatment: Increase D-gain and then P-gain until position error stops
decreasing
Side effects: Possible high noise produced by excess of D-gain. A
compromise between the D-gain setting and an acceptable
position error must be reached. This will be mainly controlled
by value of P-gain.
 Loading...
Loading...


