Temposonics
®
E-Series CANopen
Operation Manual
10
4.1 Functionality and system design
Product designation
• Position sensor Temposonics
®
E-Series
Construction serie
• Temposonics
®
E-Series EP/EL/EH
• Stroke length: EP 50…2540 mm (2…100 in.)
EL 50…2540 mm (2…100 in.)
EH 50…2540 mm (2…100 in.)
• Output signal: CANopen
Application
The Temposonics
®
sensor is used for measurement and conversion
of the length (position) variable in the fields of automated systems and
mechanical engineering.
Principle of operation and system construction
For position measurement, the absolute, linear Temposonics
®
position
sensors make use of the properties offered by the specially designed
magnetostrictive waveguide. Inside the sensor a torsional strain pulse
is induced in the waveguide by momentary interaction of two magnet-
ic fields. The interaction between these two magnetic fields produces
a strain pulse, which is detected by the converter at the sensor elec-
tronics housing. One field is produced by a moving position magnet,
which travels along the sensor rod with the waveguide inside. The oth-
er field is generated by a current pulse applied to the waveguide. The
position of the moving magnet is determined precisely by measuring
the time-of-flight between the application of the current pulse and the
arrival of the strain pulse at the sensor head. The result is a reliable
position measurement with high accuracy and repeatability.
4. Product description and commissioning
4
5
3
1
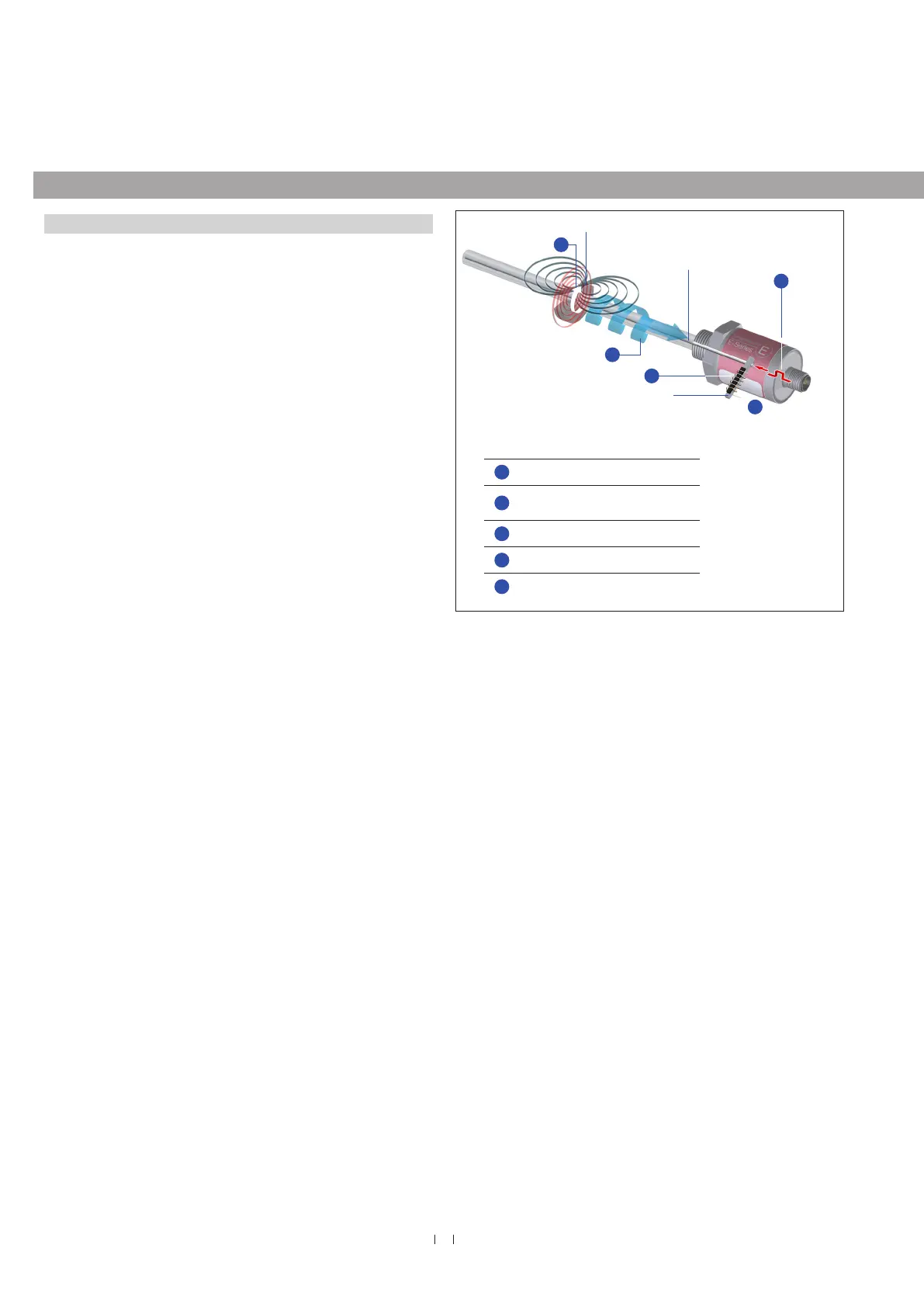
Measurement cycle
1 Current pulse generates magnetic fi eld
2
Interaction with position magnet fi eld
generates torsional strain pulse
3 Torsional strain pulse propagates
4 Strain pulse detected by converter
5 Time-of-fl ight converted into position
Sensing element (Waveguide)
Position magnet (Magnetic fi eld)
Torsional strain pulse converter
2
Fig. 2: Principle of operation: Time-of-flight based magnetostrictive position sensing principle
Modular mechanical and electronic construction
• The sensor housing (rod/profile) protects the sensor element.
• The sensor electronics housing, a rugged aluminum/stainless steel
construction, contains the complete electronic interface with
active signal conditioning.
• The external position magnet is a permanent magnet. Mounted
on the mobile machine part, it travels along the sensing element
and triggers the measurement through the housing wall.
• Depending on the type, the sensor is connected to the controller
via a plug.
• The sensor can be connected directly to a control system.
Its electronics generates a strictly position-proportional signal
output between zero and end position.

 Loading...
Loading...


