7.4.1) Funkcja „Otwiera zawsze”
Funkcja„Zawszeotwórz”jestopcjąsłużącądowykonaniamanewruotwar-
cia,kiedysterowanie„krok-po-kroku”trwadłużejniż2sekundy;jestto
przydatne,naprzykład,abypodłączyćdozaciskuP.P.(Krokpokroku)styku
zegaraprogramującegotak,abybramabyłastaleotwartaopewnej
porzednia.Tafunkcjajestaktywnabezwzględunasposóbzaprogra-
mowania wejścia P.P, za wyjątkiem funkcji „Zamyka”, patrz parametr
„Funkcja Krok po kroku” w tabeli 7.
7.4.2) Funkcja „Otwórz awaryjnie”
Wprzypadku,kiedyurządzeniebezpieczeństwaniedziałaprawidłowo
lub nie działa w ogóle, istnieje możliwość sterowaniaiprzesuwania
bramywtrybie„ręcznym”.
Szczegóły są podane w paragrafie „Sterowaniezzabezpieczeniami
niedziałającymi”,znajdującymsięwzałączniku„Instrukcjeiostrzeże-
niaprzeznaczonedlaużytkownikasiłownikaROBUS”.
7.4.3) Wezwanie do konserwacji
ROBUS pozwana na przypomnienie użytkownikowi, kiedy należy
dokonać kontroli konserwacyjnej automatyki. Ilość manewrów, po
którejnastępujewezwaniepodzielonajestna8poziomówzapomocą
zmiennego parametru „Wezwanie do konserwacji” (patrz tabela 7).
Poziom1regulacjijest„automatyczny”ibierzepoduwagęciężkość
manewrów,toznaczysiłęiczastrwaniamanewru,natomiastpozo-
stałeregulacjeokreślanezostająnapodstawieilościmanewrów.
Sygnalizacjapotrzebykonserwacjinastępujepoprzezmiganielampy
ostrzegawczejlublampypodłączonejdowyjściaSCA,gdyjestzapro-
gramowana jako „Kontrolka Konserwacji” (zob. tabela 7).
Napodstawieilościwykonanychmanewrówwstosunkudozaprogra-
mowanejgranicy,pulsowanielampyorazkontrolkikonserwacjipodają
sygnały,októrychwtabeli14.
7.4) Funkcje specjalne
Tabela 12: Programy ROBUS Slave niezależne od ROBUS Master
Funkcje pierwszego poziomu (funkcje ON – OFF) Funkcje drugiego poziomu (parametry regulowane)
Stand-by Prędkośćsilnika
Momentstartowy WyjścieSCA
TrybSlave Siłasilnika
Wykazbłędów
DoSlavepodłączyćmożna:
•
własnąlampęostrzegawczą(Flash)
•
własnąkontrolkęotwartejbramy(S.C.A.)
•
własnąlistwękrawędziową(Stop)
•
własnypulpitsterowniczy(P.P.),sterującycałkowitymotwarciemskrzydłaSlave.
•
WurządzeniuSlavewejściaOpeniCloseniesąużywane
7.3.6) Rozpoznawanie innych urządzeń
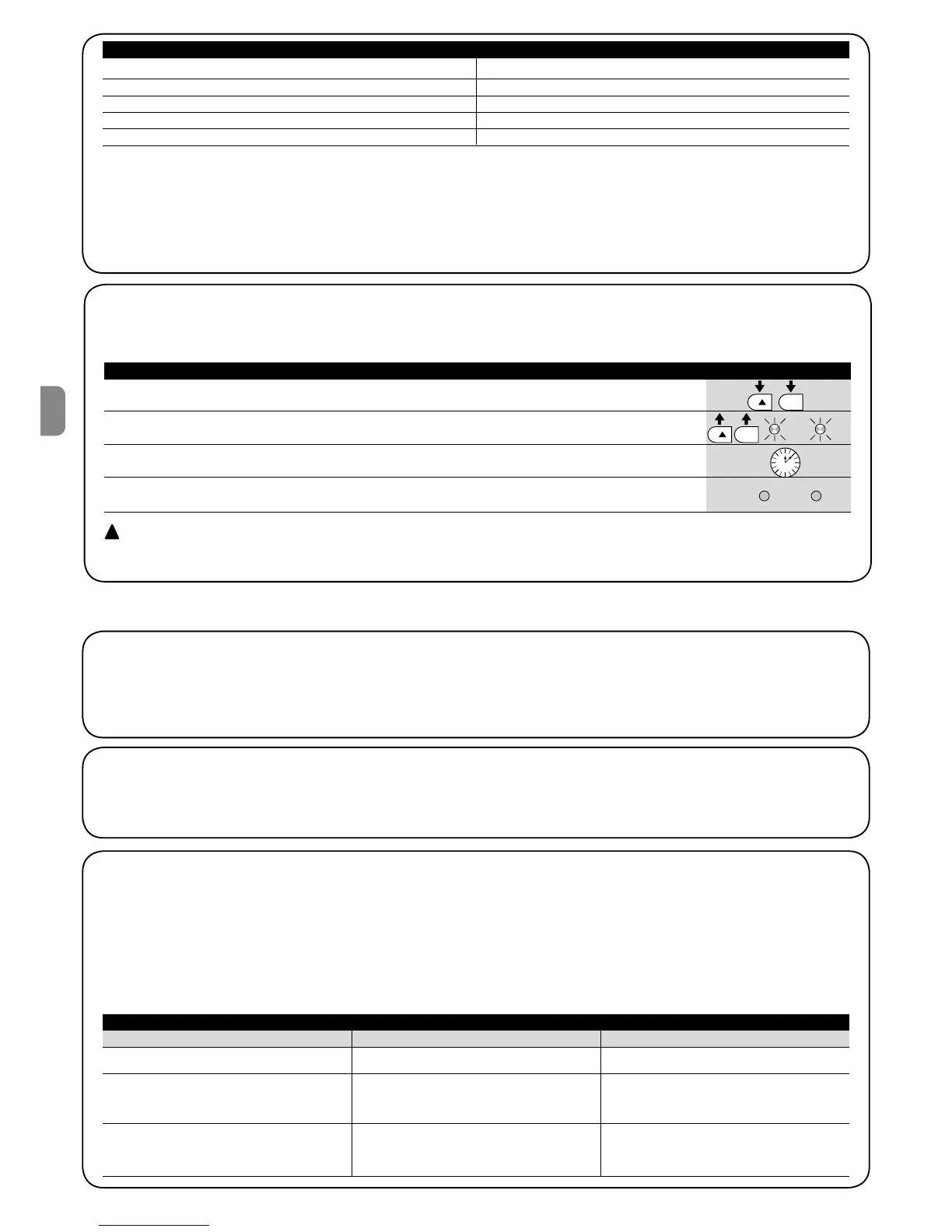
ZwykleoperacjarozpoznawaniaurządzeńdołączonychdoBLUEBUSidowejściaSTOPjestwykonywanapodczasinstalacjisystemu;jednakpokaż-
dymdodaniulubodjęciuurządzeniamożliwejestpowtórzenierozpoznawaniawsposóbpodanywtabeli13.
1. Wcisnąćitrzymaćwciśnięteprzyciski[s] i [Set]
2. Zwolnićprzyciski,kiedydiodyL1iL2zacznąbardzoszybkopulsować(pookoło3sekundach).
L1 L2
3. Odczekaćkilkasekundażcentralaskończyrozpoznanieurządzeń.
4. PozakończeniurozpoznaniadiodyL1iL2przestanąpulsować,diodaSTOPmusipozostaćzapalona,
natomiastdiodyL1...L8zapaląsięzgodniezestanemfunkcjiON-OFF,któreobrazują.
L1 L2
Po dodaniu lub usunięciu urządzeń, konieczne jest ponowne wykonanie odbioru automatyki zgodnie z tym, co podano w
paragrafie „5.1 Próby odbiorcze”.
Tabela 13: rozpoznanie innych urządzeń Przykład
SET
SET
Ilość manewrów Sygnalizacja Flash Sygnalizacja kontrolki konserwacji
Poniżej80%limitu
Pomiędzy81a100%limitu
Ponad 100% limitu
Normalna(0,5zwłączone,0,5swyłączone)
Napoczątkumanewrupozostajewłączone
przez2s,anastępnieprzechodzidotrybu
normalnego.
Napoczątkumanewrupozostajewłączone
przez2s,anastępnieprzechodzidotrybu
normalnego.
Włączonaprzez2snapoczątkuotwierania
Pulsujeprzezcałyczastrwaniamanewru
Pulsuje stale.
Tabela 14 - wezwanie do konserwacji przy pomocy Flash i kontrolki konserwacji
 Loading...
Loading...