14
2. System Configuration
This chapter describes the system configuration and target devices to construct robot
vision applications.
2.1. Cautions for Robot Equipment
None.
2.2. When using Vision Sensor FH Series 3D Vision Sensor
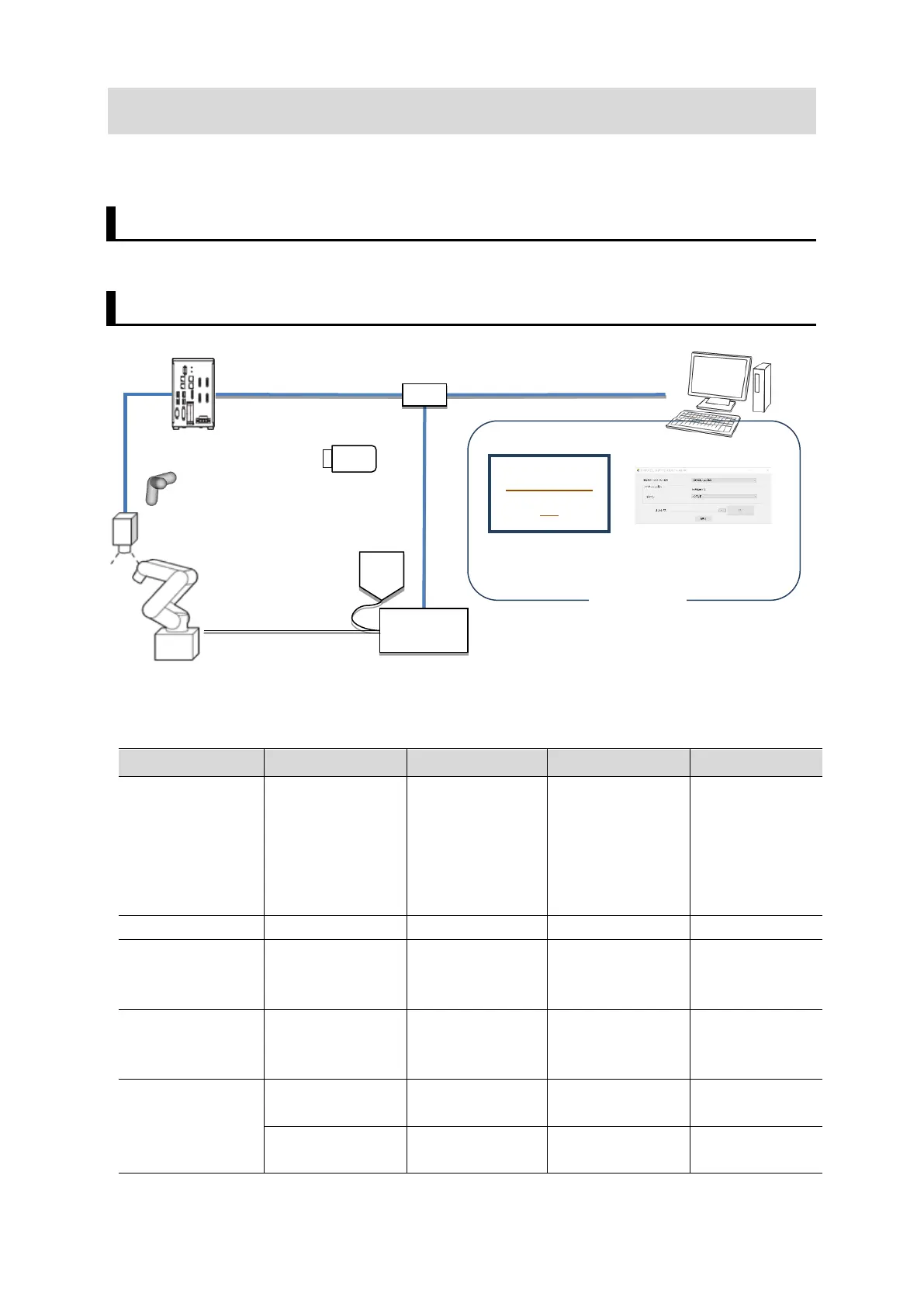
2.2.1. System Configuration
2.2.2. Target Devices
Vision Sensor OMRON Vision Sensor
FH Series
FH-5050 Ve r. 6 . 40 or
later
Controllers other
than FH-5050
are not
Camera Cable OMRON Ethernet cable
super bending
FHV-VNBX□M
FHV-VNLBX□M
-
Camera I/O cable OMRON I/O cable super
bending
FH-VSDX-BX□M
FH-VSDX-LBX□M
-
Calibration target OMRON Handeye
FH-XCAL-R -
OMRON Camera
FH-XCAL-S -
Switching Hub
Robot
Robot controller
Teaching Pendant
Vision Sensor
PC
USB memory
WINCAPSIII
PC software
(
)
3D Camera
Calibration Target
Data set output tool
for 3D Robot Vision
WINCAPS
Ⅲ

 Loading...
Loading...














