33
6.1. Connecting Vision Sensor to Robot Controller
For connecting the Vision Sensor to the Robot Controller, follow the procedures below.
1
Declare internal variables.
* Omitted (Refer to the source code)
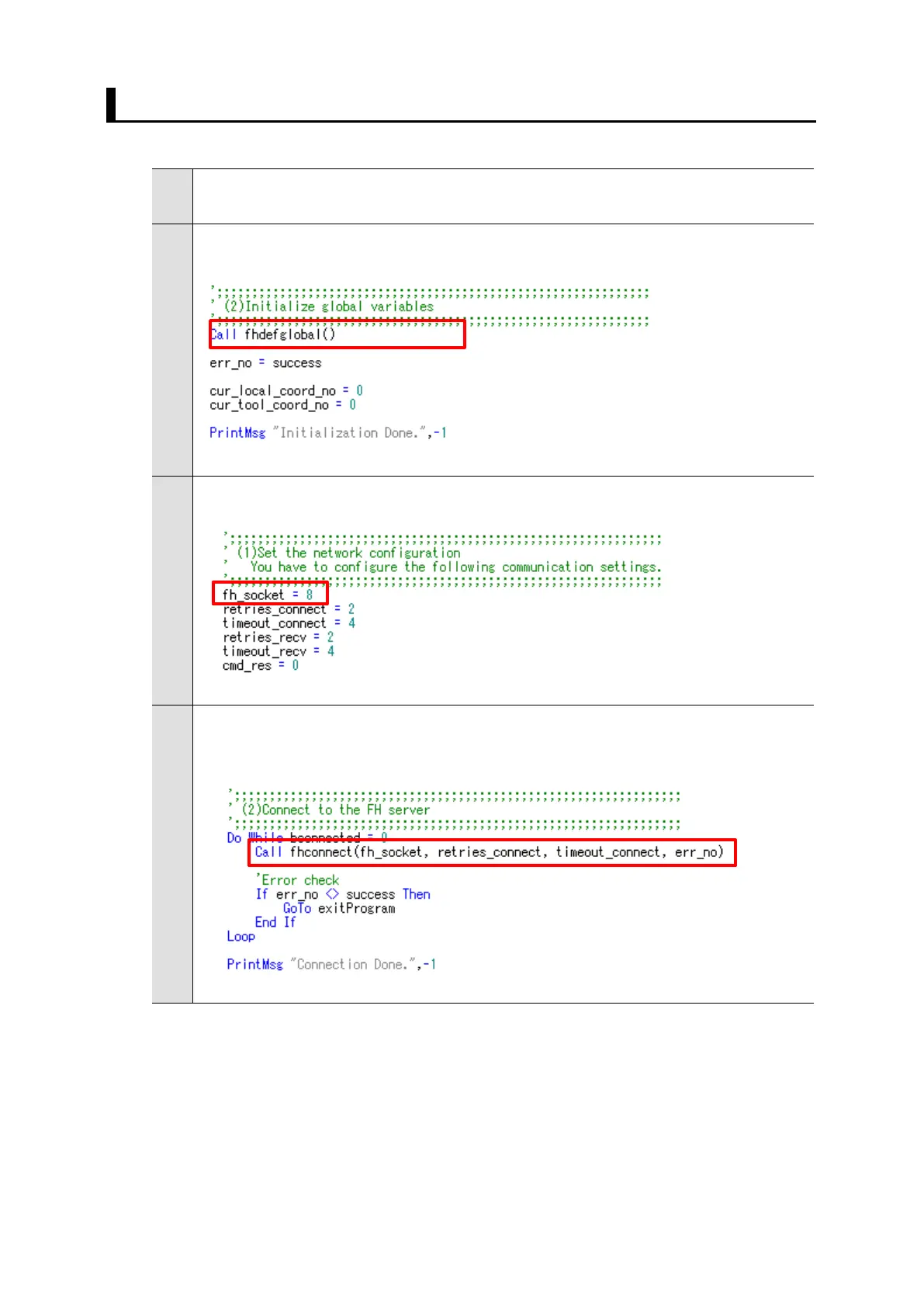
2
Execute the initialization function (fhdefglobal) for external variables.
3
Ethernet client number Setting is the same as step 7 in Chapter 3.1.
4
Set the variables as arguments for the connection function (fhconnect)
to the Vision Sensor (FH server) and execute it.
Connection function with the Vision Sensor (FH server)
Initialization function for external variables

 Loading...
Loading...














