37
6.6. Getting the Measurement Results
The Vision Sensor measurements are received using "fhrunrecvval". In this sample
program, it is assumed that the Vision Sensor measurements are sent in the order
"TJG X Y Z W P R".
1
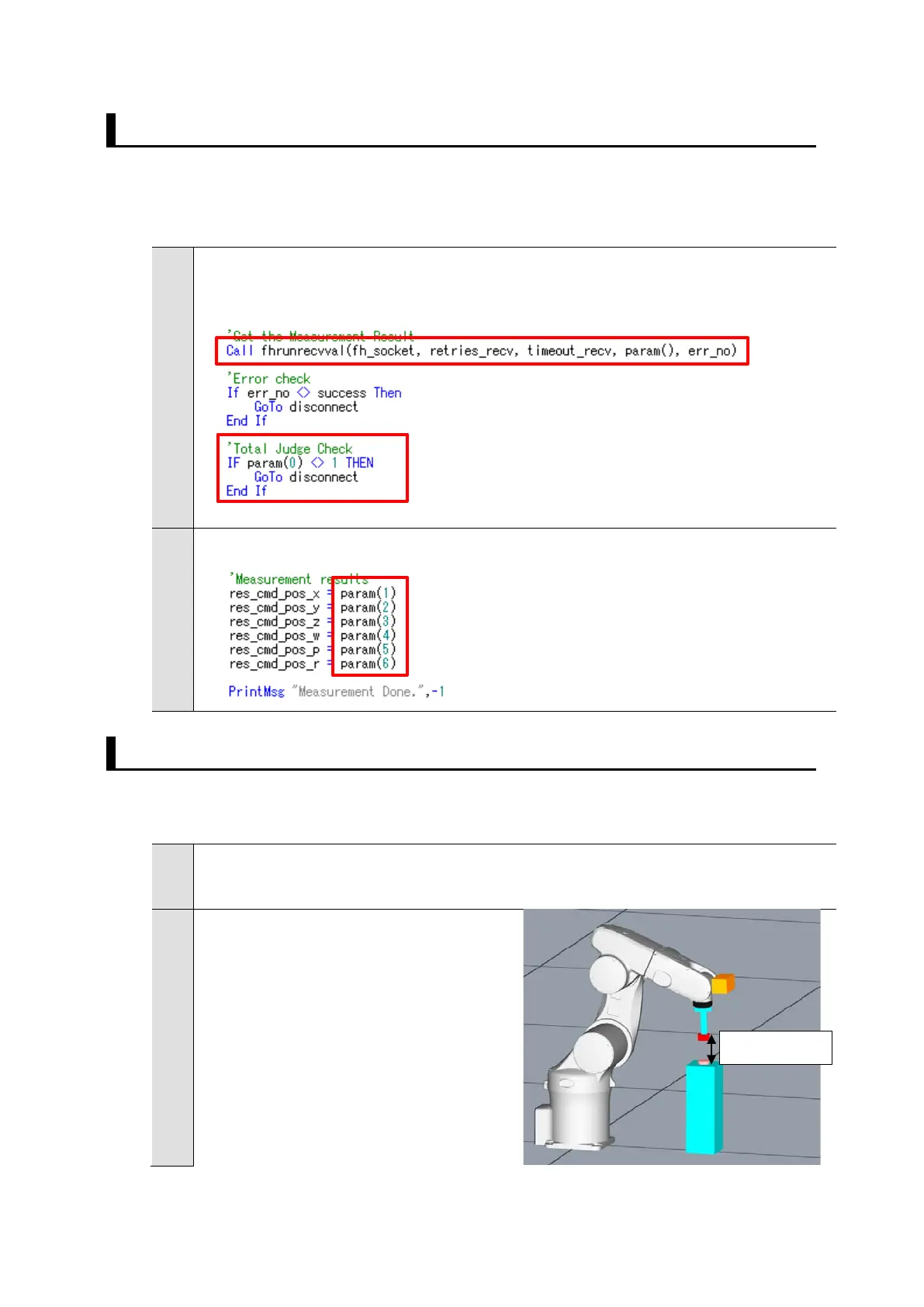
In order to receive the measurement results from the Vision Sensor, we
execute "fhrunrecvval" and check the received overall judgment value.
2
The measurement results X - R are stored in the variables.
6.7. Moving Robot to Robot Approach Position at Measurement
For a processing to move the robot to the robot approach position at measurement,
follow the procedures below.
1
By the procedures at the step 2 in Chapter 6.6, check that the measurement
results are stored in the variables
2
The depth of the container, the height
of the workpiece position and the
length of the hand are taken into
account to determine the approach
distance to the workpiece.
numerical sequence receiving function
If the overall judgment is not OK, exit the program
The measurement results X-R

 Loading...
Loading...














