40
7. Function Reference
This chapter describes the functions for building a robot vision application
7.1. List of Functions
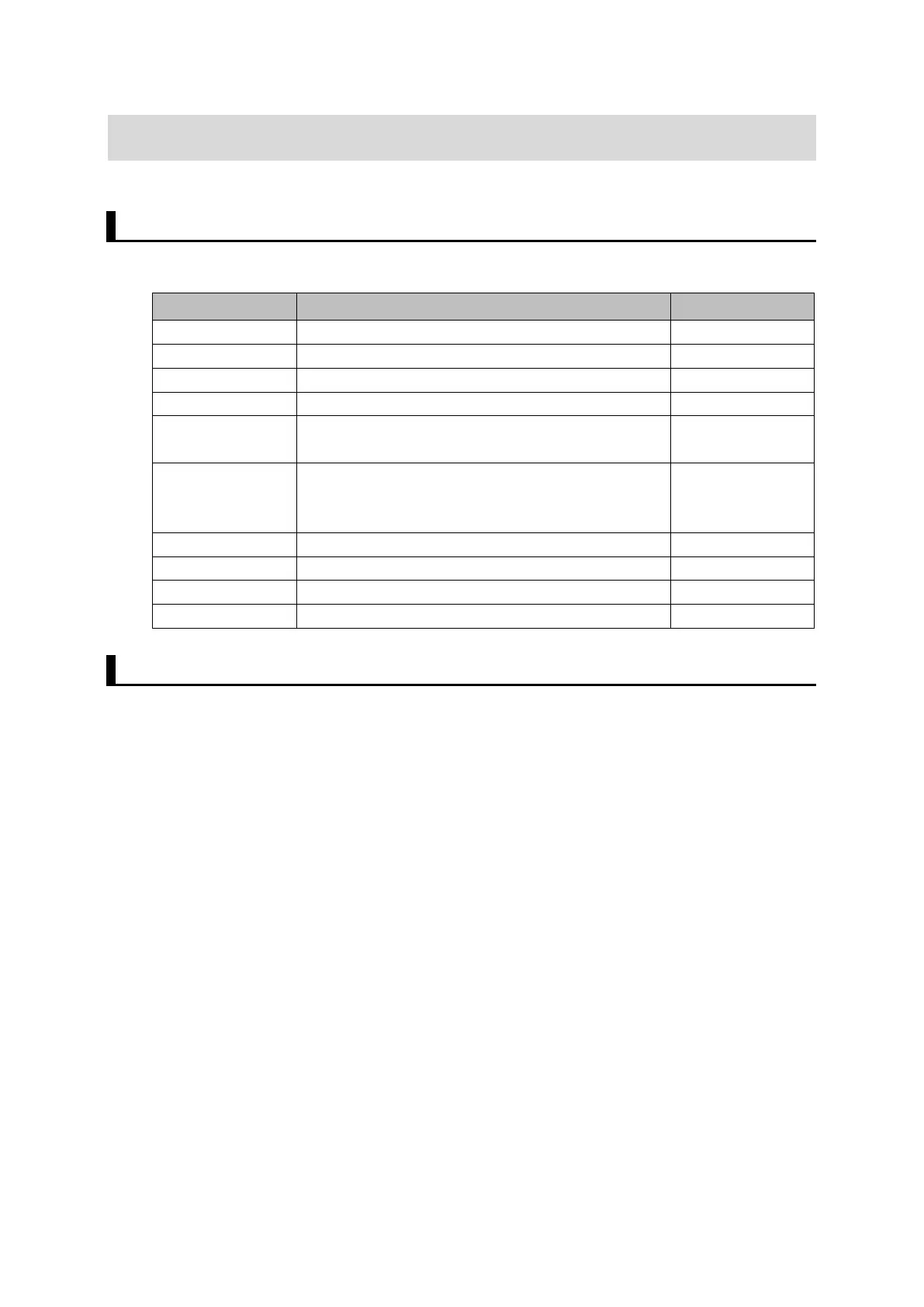
This is a list of functions that can be used by the actual driving robot program.
Initialize a global variable.
Connect to the Vision Sensor
Disconnects from the Vision Sensor
Switching the scene of the Vision Sensor
fhsample_regpos Register the current robot position to the Vision
Chapter 7.3.5
fhsample_trig Sends measurement commands to the Vision Sensor
and receives the measurement results from the
Vision Sensor
Chapter 7.3.6
Send a no-procedure command to the Vision Sensor
Receive a command response from the Vision Sensor
Receive numerical data from the Vision Sensor
7.2. Error Message
The error message will be displayed on the user screen of the teaching pendant.
On the basic screen of the Teaching Pendant, select [SHIFT] and press the [F5
MessageLog] Button.

 Loading...
Loading...














