6-14
6-5 Encoder Dividing Function
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
6
Applied Functions
6-5 Encoder Dividing Function
Outline of Operation
The number of output pulses from the drive can be adjusted.
You can set the number of pulses per motor rotation in the range of 1 to (the number of encoder
resolution pulses).
This function is used in the following cases:
- When you use a controller with a low response frequency
- When you want to set the pulse rate corresponding to a certain value
Example: Set the encoder dividing ratio to 2,000 (pulses/rotation) for when the
resolution is set to 5 μm/pulse on mechanical systems that travel 10 mm per
motor rotation.
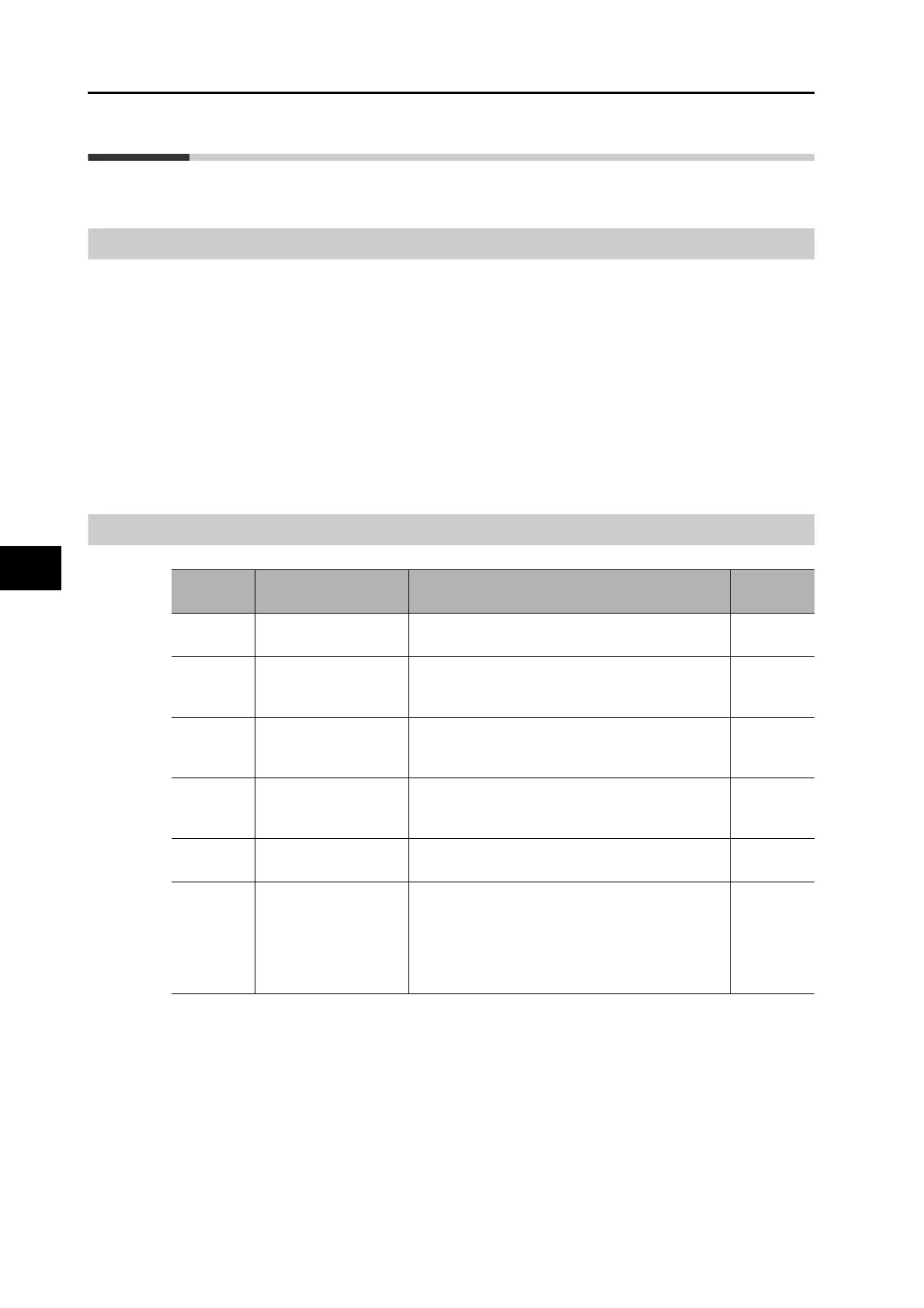
Parameters Requiring Settings
Parameter
number
Parameter name Explanation Reference
Pn011
Encoder Dividing
Numerator
Set the number of phase-A and phase-B output
pulses, respectively per motor rotation.
P.8-6
Pn012
Encoder Output
Direction Switching
Selection
Select the phase B logic for pulse regeneration
output and the output source. P.8-6
Pn503
Encoder Dividing
Denominator
Set the denominator when the number of pulses
per motor rotation in pulse regeneration is not an
integer.
P.8-47
Pn533
Pulse Regeneration
Output Limit Setting
Set whether to enable or disable the detection of
Alarm 28.0 "pulse regeneration error."
0: Disabled, 1: Enabled
P.8-59
Pn620
External Encoder
Phase-Z Setting
Set the external encoder phase-Z output width.
P.8-63
Pn622
90° Phase Difference
Output External
Encoder Pulse Output
Method Selection
Select the regeneration method of pulse outputs A
and B when a 90° phase difference output type
external encoder is used.
0: Without signal regeneration.
1: With signal regeneration for phase-A and
phase-B. Without signal regeneration for phase-Z.
P.8-63
 Loading...
Loading...