8-47
8-6 Extended Parameters
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
8
Parameter Details
8-6 Extended Parameters
If encoder dividing denominator ≠ 0, division is performed at the rate according to the formula
below.
Therefore, the formula will be as follows when the host side counts pulses through processing with
quadruple multiplier.
Number of pulse output resolution per rotation = × Encoder resolution
The pulse output resolution per rotation will never exceed the encoder resolution. (If the above
settings are used, the pulse output resolution per rotation will be equal to the encoder resolution.)
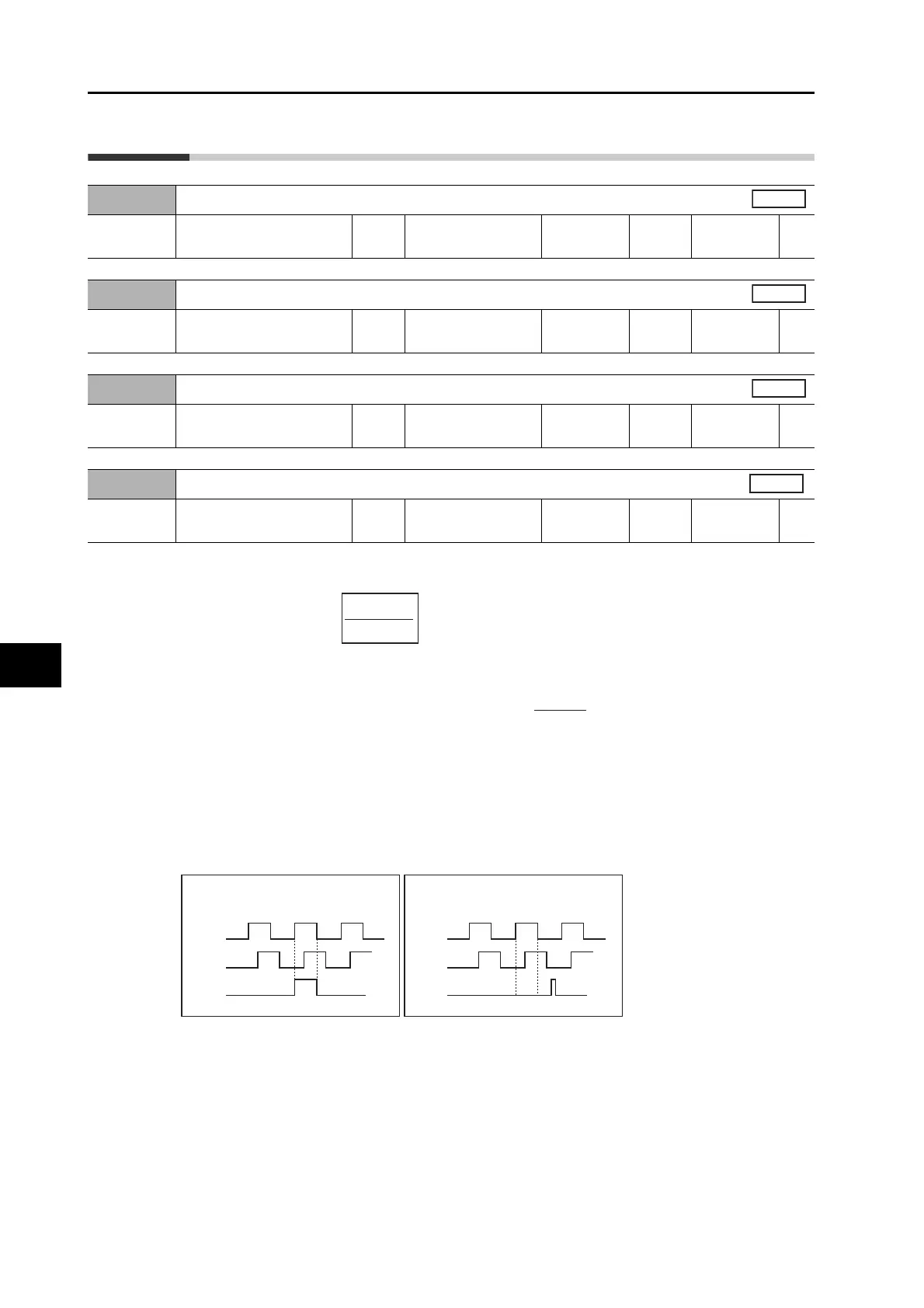
1 phase-Z signal is output for each rotation of the motor.
If the pulse output resolution per rotation from the above equation is a multiple of 4, phases Z and
A are output in synchronization. In all other cases, the output width of phase Z will be output as
the encoder resolution, resulting to be narrower than phase A. Accordingly, phases A and Z will
not be synchronized.
Pn500
Electronic Gear Ratio Numerator 2
Setting
range
0 to 2
30
Unit −
Default
setting
0
Power OFF
and ON
−
Pn501
Electronic Gear Ratio Numerator 3
Setting
range
0 to 2
30
Unit −
Default
setting
0
Power OFF
and ON
−
Position
Pn502
Electronic Gear Ratio Numerator 4
Setting
range
0 to 2
30
Unit −
Default
setting
0
Power OFF
and ON
−
Position
Pn503
Encoder Dividing Denominator
Setting
range
0 to 262,144 Unit −
Default
setting
0
Power OFF
and ON
Yes
Pn011
Pn503
Encoder FB pulse →→ Output pulse
A
B
Z
Synchronous
A
B
Z
Asynchronous
The output source is the encoder and
the pulse dividing ratio is a multiple of 4.
The output source is the encoder and
the pulse dividing ratio is not a multiple of 4.
 Loading...
Loading...