10-3
10-2 Realtime Autotuning
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
10
Adjustment Functions
10-2 Realtime Autotuning
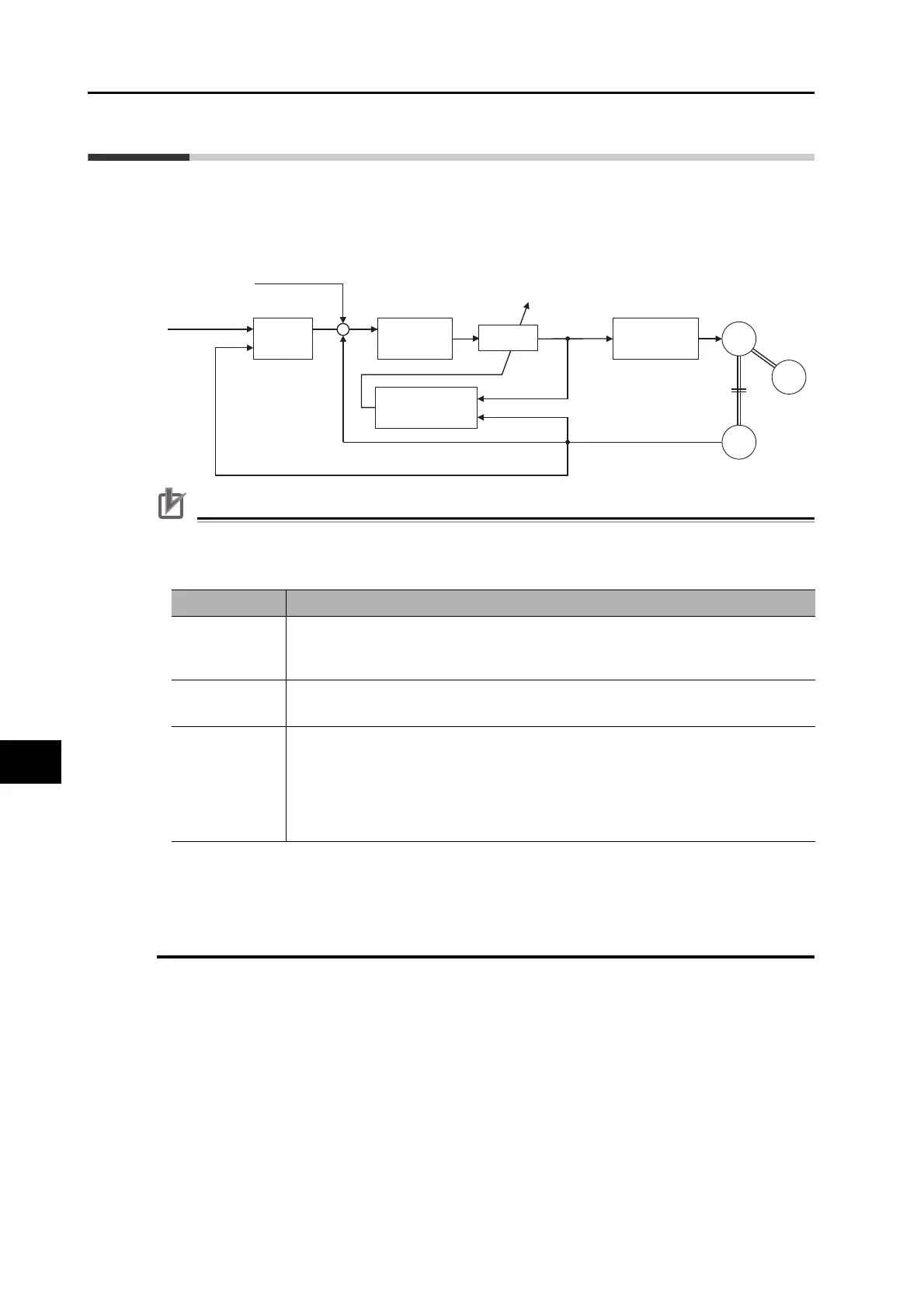
Realtime autotuning estimates the load inertia of the machine in realtime, and operates the
machine by automatically setting the gain according to the estimated load inertia. At the same
time, it can lower the resonance and vibration if the adaptive filter is enabled.
Realtime autotuning is enabled for any control to adjust the speed loop PI control.
Precautions for Correct Use
Realtime autotuning may not function properly under the conditions described in the following
table. In such cases, use manual tuning.
With realtime autotuning, each parameter is fixed to the value in the machine rigidity table at the
time the machine rigidity is set. By estimating the load inertia from the operation pattern, the
operation coefficient for the speed loop gain and the integral time constant are altered. Doing this
for each pattern can cause vibration, so the estimation value is set conservatively.
Position feedback
Estimate load
inertia.
Position
command
Speed command
Speed feedback
Position
control
Current loop
control
Torque
command
SM
RE
Load
Speed
PI control
Inertia
Pn100 Pn102
Pn101
Pn004
Pn104
Conditions under which realtime autotuning does not operate properly
Load inertia
If the load inertia is too small or too large compared with the rotor inertia (less than
3 times, more than 20 times, or more than the applicable load inertia ratio).
If the load inertia changes quickly. (in less than 10 s)
Load
If the machine rigidity is extremely low.
If there is backlash or play in the system.
Operation
pattern
If the speed continues at below 100 r/min.
If the acceleration/deceleration is below 2,000 r/min in 1 s.
If the acceleration/deceleration torque is too small compared with the unbalanced
load and the viscous friction torque.
If either a speed of 100 r/min or higher, or an acceleration/deceleration of 2,000 r/
min/s does not last for at least 50 ms.
 Loading...
Loading...