4-101
4-7 Making Adjustments
The OMNUC W-series AC Servo Driver is equipped with an online auto-tuning function.
Use this function to easily adjust the gain even if you are using a servo system for the first
time. If you cannot use the online auto-tuning function, adjust the gain manually.
4-7-1 Online Auto-tuning
H What Is Online Auto-tuning?
• Online auto-tuning is a control function that measures the driver’s load inertia while it is operating, and
attempts to maintain constantly the target speed loop gain and position loop gain.
Note You cannot use online auto-tuning in the following cases.
• When the Torque Control Mode is used for control.
• When IP control is used for a speed control loop (Pn10b.1 = 1).
• When using No. 2 gain for control (i.e., when GSEL (gain switching input) is input or automatic
gain switching is used).
• When the torque feed-forward function is used (Pn002.0 = 2).
• When the speed feedback compensation function is used (Pn110.1 = 0).
H Online Auto-tuning Related Settings
• The following tables show the user parameters and System Check Modes relating to online auto-tun-
ing.
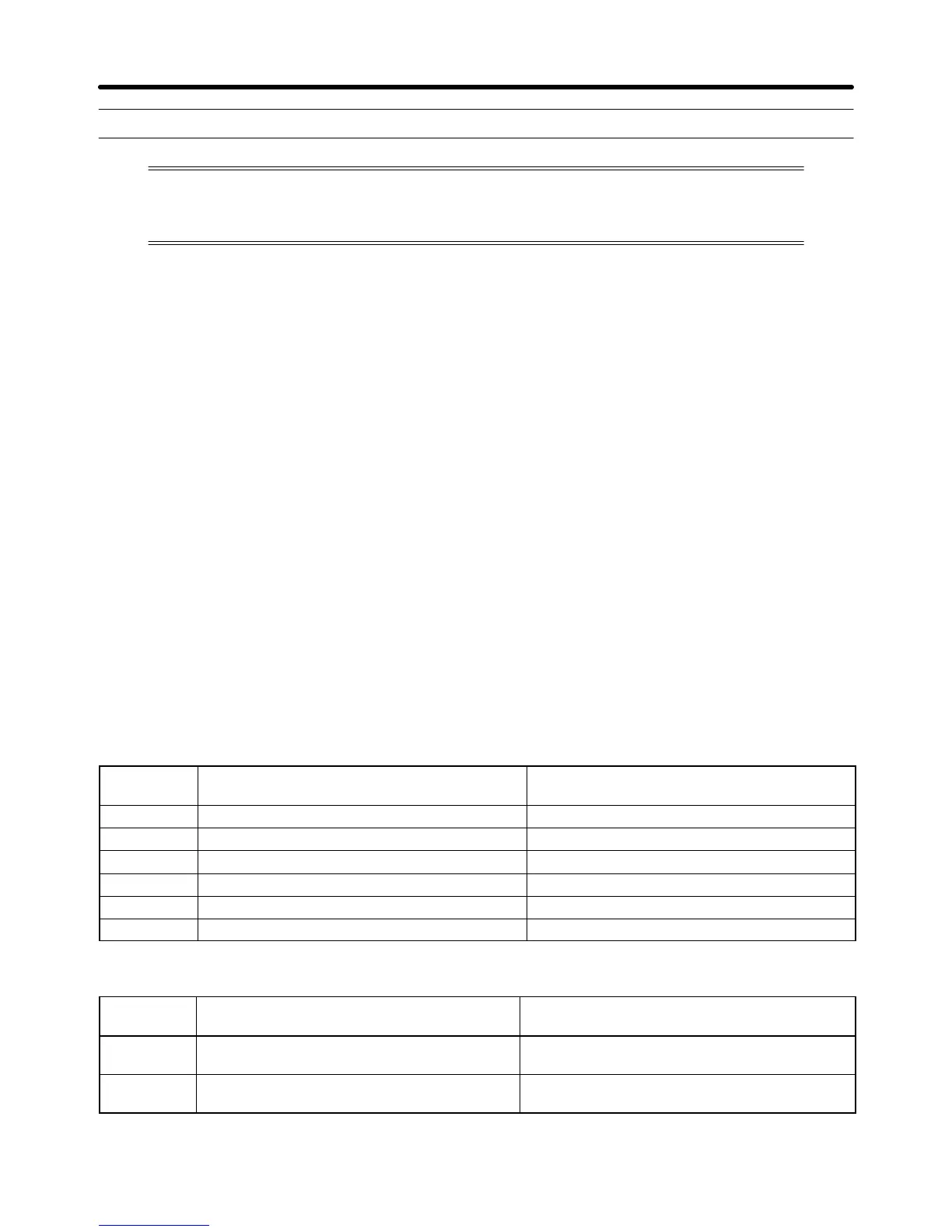
D User Parameters (Pnjjj)
Parameter
No.
Parameter name Explanation
Pn100 Speed loop gain Target value for auto-tuning
Pn101 Speed loop integration time constant Integration time constant for auto-tuning
Pn102 Position loop gain Target value for auto-tuning
Pn103 Inertia ratio Initial value for auto-tuning
Pn110 Online auto-tuning setting Select auto-tuning function
Pn401 Torque command filter time constant Filter time constant for auto-tuning
D System Check Mode (Fnjjj)
Function
code
Function name Explanation
Fn001 Rigidity setting for online auto-tuning Select 10 stages from a combination of Pn100,
Pn101, Pn102, and Pn401. (See note.)
Fn007 Storing of online auto-tuning results The inertia ratio calculated using online
auto-tuning is written to Pn103 (inertia ratio).
Note The selected value is written to the user parameters.
Operation Chapter 4
 Loading...
Loading...
