4-24
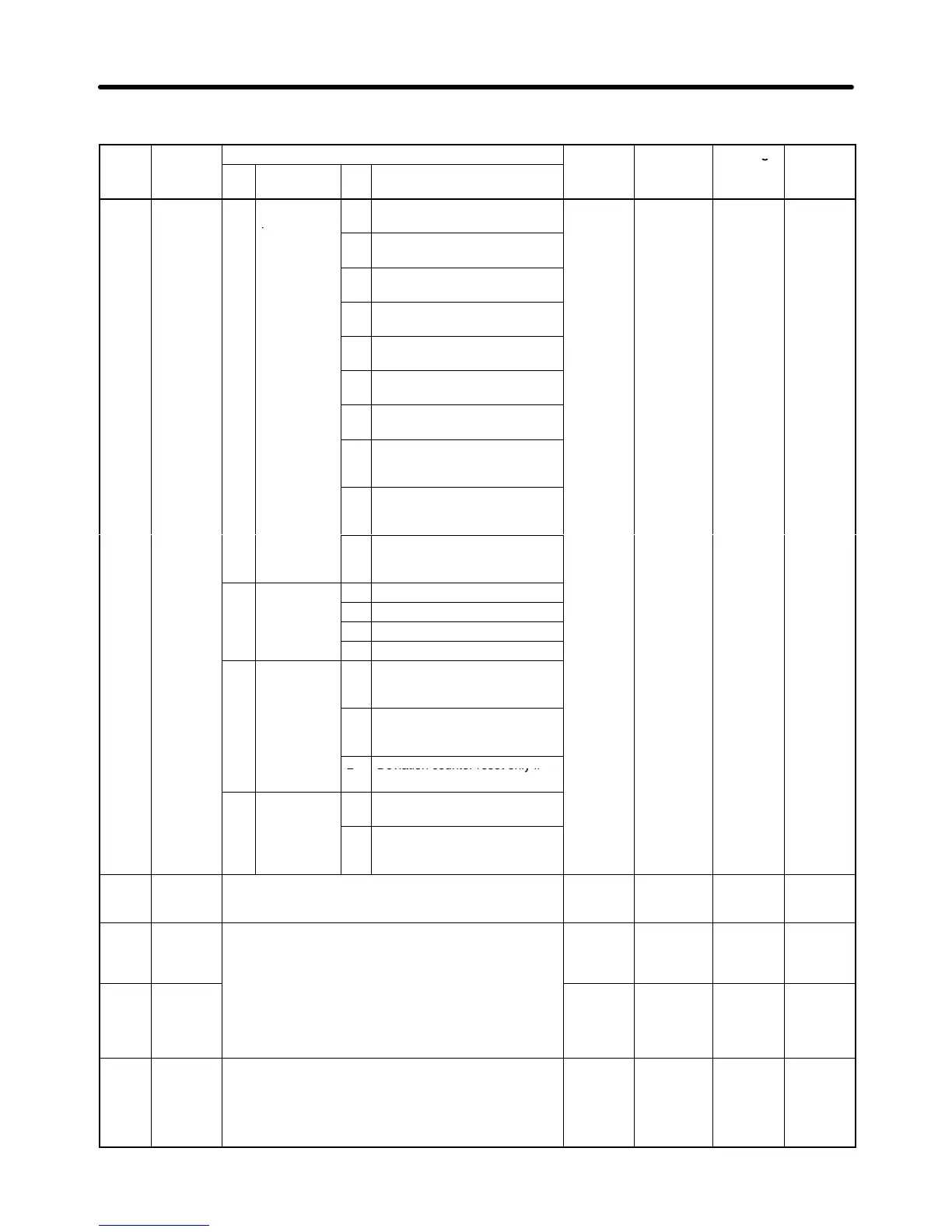
H Position Control Parameters (From Pn200)
Param- Parameter
Explanation (See note 1.)
Default
eter
No.
name
Digit
No.
Name Set-
ting
Explanation (See note 2.)
setting
range power?
Pn200 Position
control
0 Command
pulse mode
0 Feed pulse forward/reverse
signal: Positive logic
1011 --- --- Yes
setting 1
1 Forward pulse/reverse pulse:
Positive logic
2 90° phase difference (A/B
phase) signal (x1): Positive logic
3 90° phase difference (A/B
phase) signal (x2): Positive logic
4 90° phase difference (A/B
phase) signal (x4): Positive logic
5 Feed pulses/Forward/reverse
signal: Negative logic
6 Forward pulse/reverse pulse:
Negative logic
7 90° phase difference (A/B
phase) signal (x1): Negative
logic
8 90° phase difference (A/B
phase) signal (x2): Negative
logic
9 90° phase difference (A/B
phase) signal (x4): Negative
logic
1 Deviation
0 High level signal
counter reset
1 Rising signal (low to high)
2 Low level signal
3 Falling signal (low to high)
2 Deviation
counter reset
if an alarm
0 Deviation counter reset if an
alarm occurs when Servomotor
is OFF.
occurs when
the
Servomotor
1 Deviation counter not reset if an
alarm occurs when Servomotor
is OFF.
2 Deviation counter reset only if
Deviation counter reset only if
alarm occurs.
3 Pulse
command
0 Command filter for line driver
signal input (500 kpps)
filter
selection
1 Command filter for
open-collector signal input
(200 kpps)
Pn201 Encoder
divider
rate
Sets the number of output pulses from the Servo Driver. 1000 pulse/rota-
tion
16 to
16384
Yes
Pn202 Electronic
gear ratio
G1 (nu-
merator)
Sets the pulse rate for the command pulses and Servo
Servomotor travel distance.
0.01 G1/G2 100
4 --- 1 to
65535
Yes
Pn203 Electronic
gear ratio
G2 (de-
nomina-
tor)
1 --- 1 to
65535
Yes
Pn204 Position
command
filter time
constant 1
(primary
filter)
Sets soft start for command pulse. (Soft start characteristics
are for the primary filter.)
0 x 0.01 ms 0 to 6400 ---
Operation Chapter 4

 Loading...
Loading...

