ors
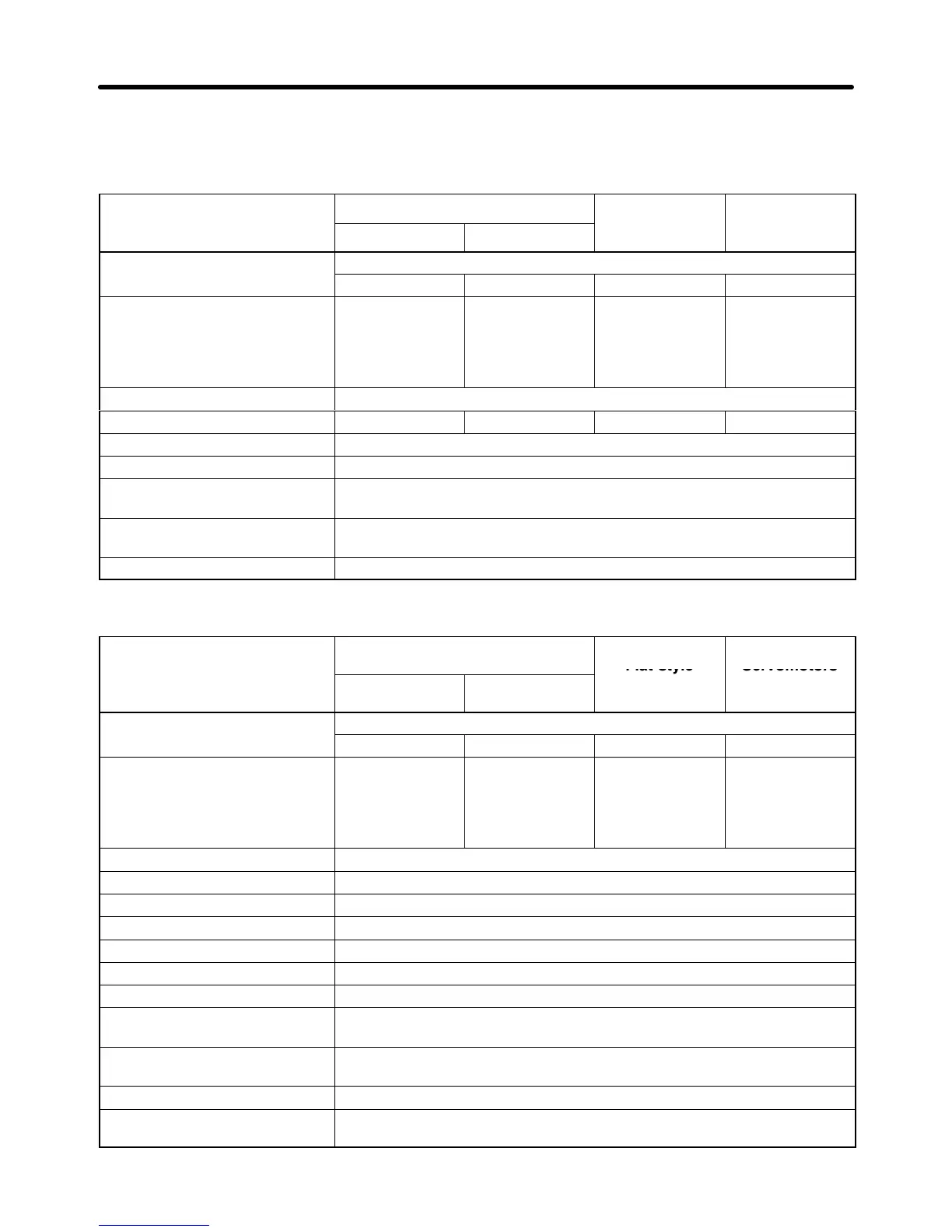
Encoder method
Optical encoder
13 bits 17 bits 13 bits 17 bits
Number of output pulses A, B phase:
2,048 pulses/
revolution
Z phase: 1
pulse/revolution
A, B phase:
32,768 pulses/
revolution
Z phase: 1
pulse/revolution
A, B phase:
2,048 pulses/
revolution
Z phase: 1
pulse/revolution
A, B phase:
32,768 pulses/
revolution
Z phase: 1
pulse/revolution
Power supply voltage 5 V DC±5%
Power supply current 120 mA 150 mA 120 mA 150 mA
Maximum rotation speed 5,000 r/min
Output signals +S, –S
Output impedance Conforming to EIA RS-422A.
Output based on LTC1485CS or equivalent.
Serial communications data Position data, poll sensor, U, V, W phase, encoder alarm, Servomotor
data
Serial communications method Bi-directional communications in HDLC format, by Manchester method
H Absolute Encoder Specifications
Item
3,000-r/min Servomotors
3,000-r/min
Flat-style
1,000-r/min
Servomotors
30 to 750 W 1 to 5 kW
1,500-r/min
Servomotors
Encoder method
Optical encoder
16 bits 17 bits 16 bits 17 bits
Number of output pulses A, B phase:
16,384 pulses/
revolution
Z phase: 1
pulse/revolution
A, B phase:
32,768 pulses/
revolution
Z phase: 1
pulse/revolution
A, B phase:
16,384 pulses/
revolution
Z phase: 1
pulse/revolution
A, B phase:
32,768 pulses/
revolution
Z phase: 1
pulse/revolution
Maximum rotational speed –32,768 to +32,767 rotations or 0 to 65,534 rotations
Power supply voltage 5 V DC±5%
Power supply current 180 mA
Applicable battery voltage 3.6 V DC
Battery current consumption 20 µA (for backup, when stopped), 3 µA (when Servo Driver is powered)
Maximum rotation speed 5,000 r/min
Output signals +S, –S
Output impedance Conforming to EIA RS-422A.
Output based on LTC1485CS or equivalent.
Serial communications data Position data, poll sensor, U, V, W phase, encoder alarm, Servomotor
data
Serial communications method Bi-directional communications in HDLC format, by Manchester method
Absolute value communications
data
Amount of rotation
Standard Models and Specifications Chapter 2

 Loading...
Loading...

