4-87
Note 1. When a command to travel in a prohibited direction within the drive prohibit area is input, the
Servomotor is stopped using the method set in Pn001.1. If a command to travel in the oppo-
site direction is input, the Servomotor automatically resumes operation.
Note 2. With position control, the feedback pulses and command pulses continue to be counted with-
out the deviation counter’s residual pulses being reset. If the drive prohibit input turns ON in
this state (i.e., drive permitted), the position will be shifted by the amount of the residual
pulses.
4-5-7 Encoder Dividing Function (All Operating Modes)
H Function
• With this function, any number of pulses can be set for encoder signals output from the Servo Driver.
• The number of pulses per Servomotor revolution can be set within a range of 16 to (number of encoder
resolution pulses). The upper limit is 16,384 pulses/rotation.
• Use this function for the following applications:
When using a controller with a low response frequency.
When it is desirable to set a pulse rate that is easily divisible.
(For example, in a mechanical system in which a single Servomotor revolution corresponds to a travel
of 10 mm, if the resolution is 5
µm/pulse, set the encoder dividing rate to 2,000 (pulses/revolution).
H Parameters Requiring Setting
Parameter No. Parameter name Explanation Reference
Pn201 Encoder dividing rate
setting
Set the number of encoder
pulses to be output. (See
notes 1, 2, and 3).
4-4-4 Parameter
Details
Note 1. The default setting is 1,000 (pulses/rotation), and the setting range is 16 to 16,384 (pulses/
rotation).
Note 2. These parameters are enabled when the power is turned ON again after having been turned
OFF. (Check to see that the LED display has gone OFF.)
Note 3. If a value greater than the encoder resolution is set, operation will proceed according to the
formula: (dividing rate setting) = (encoder resolution)
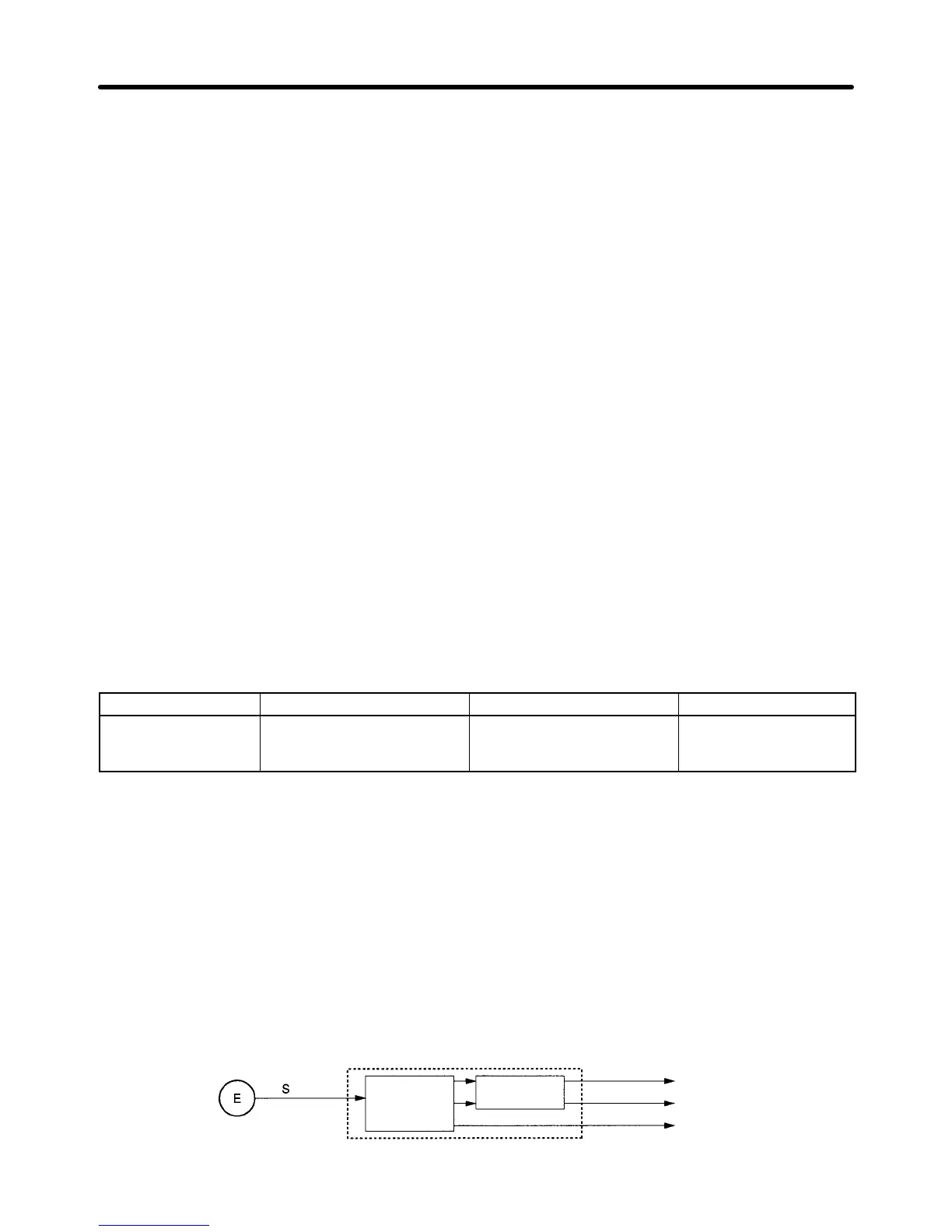
H Operation
• Incremental pulses are output from the Servo Driver through a frequency divider.
Encoder
Driver
Processing
circuitry
Frequency
divider
Phase A
Phase B
Phase Z
Operation Chapter 4

 Loading...
Loading...

