4-89
H Parameters Requiring Setting
Parameter No. Parameter name Explanation Reference
Pn50F.2 Output signal
selection 2: BKIR
signal selection
Be sure to allocate BKIR.
(See note.)
4-4-3 Important
Parameters
Pn506 Brake timing 1
This parameter sets the BKIR
output timing.
.
Pn508: Sets the standby time
from servo OFF to BKIR OFF.
Note BKIR is not allocated in the default settings.
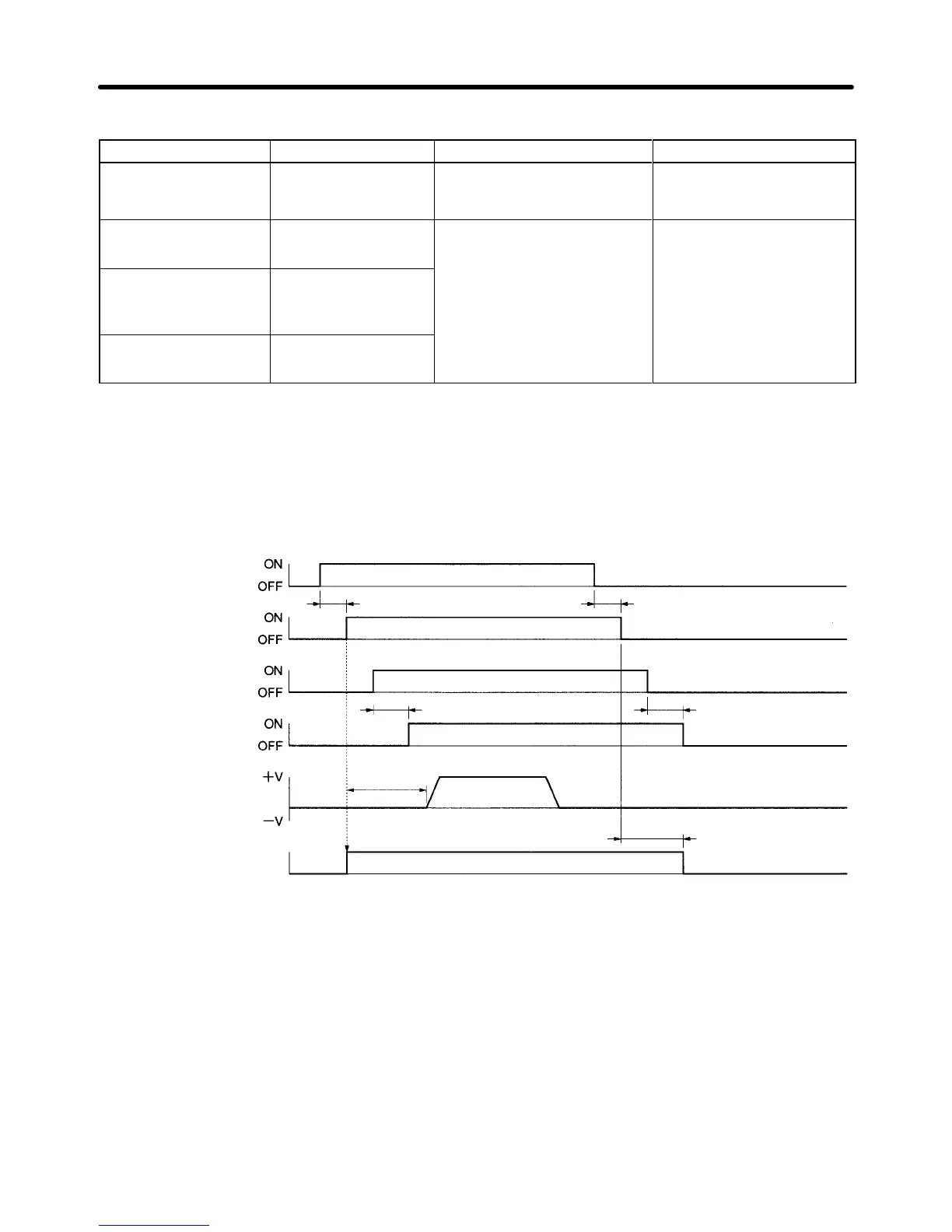
H Operation
D RUN Timing (When Servomotor Is Stopped)
RUN
BKIR (brake interlock)
Brake power
supply
Brake operation
Speed command or
pulse command
Servomotor energizing
200 ms max.
Approx. 2 ms
100 ms max.
Pn506 (See note 2.)
0 to 35 ms
See note 1.
Deenergized
Energized
Note 1. The time from turning ON the brake power supply to the brake being released is 200 ms max.
Set the speed command (pulse command) to be given after the brake has been released,
taking this delay into account.
Note 2. The time from turning OFF the brake power supply to the brake engaging is 100 ms max. If
using the Servomotor on a vertical axis, set Pn506 (brake timing 1) so that the Servomotor
deenergizes after the brake has engaged, taking this delay into account.
Operation Chapter 4

 Loading...
Loading...

