27EN
4. INSTALLATION
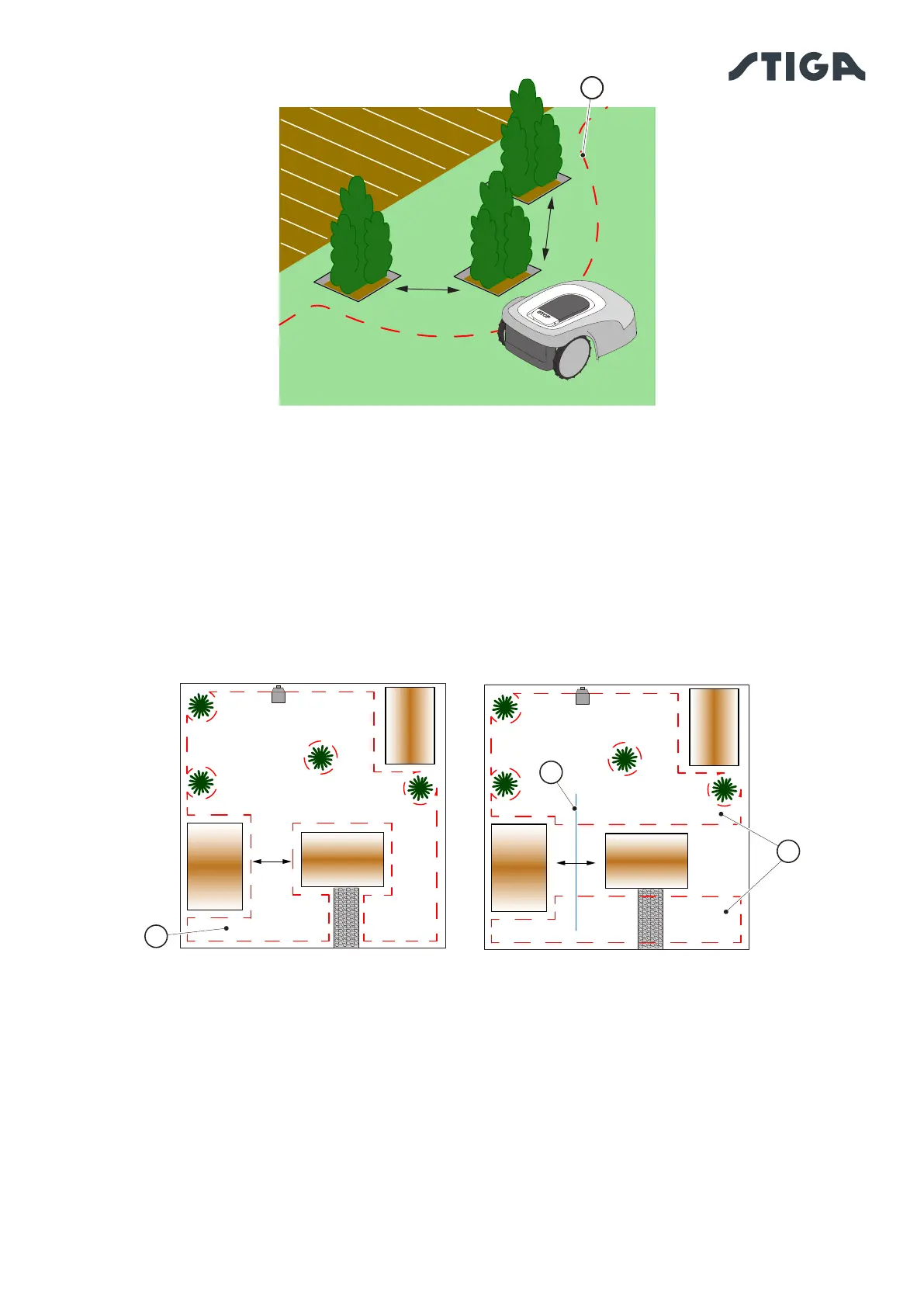
4.4.2. NARROW PASSAGES
Procedure:
1. In the case of narrow passages, the distance between two dierent virtual perimeters must be
Z ≥2 m (A).
2. In the case of a passage where the distance between the virtual boundaries would be <2m, the part
of the area beyond the bottleneck cannot automatically be reached by the robot lawn mower. In this
case, it is necessary to programme two separate virtual cutting zones (B) and connect them with a
virtual transition route (C).
3. If it is not possible to connect the two areas with a virtual transition route, the part of the area beyond
the bottleneck (A) is to be considered a 'Closed Area' (see Par. 4.4.3).
4.4.3. CLOSED AREAS
Areas that cannot be reached independently by the robot lawn mower via a virtual transition route must be
programmed as 'Closed Area' (option in App).
Each Closed Area can have a maximum surface area depending on the model (see technical data table).
If it is necessary to cover a larger area than the maximum manageable by a single Closed Area, subdivide
the area into several Closed Areas.
To program closed areas, follow the same criteria as in Par. 4.4.1.
The robot lawn mower must be brought by hand into each closed area and started manually.
<150 cm
G
<150 cm
Z
Z
A
B
C
 Loading...
Loading...





