35
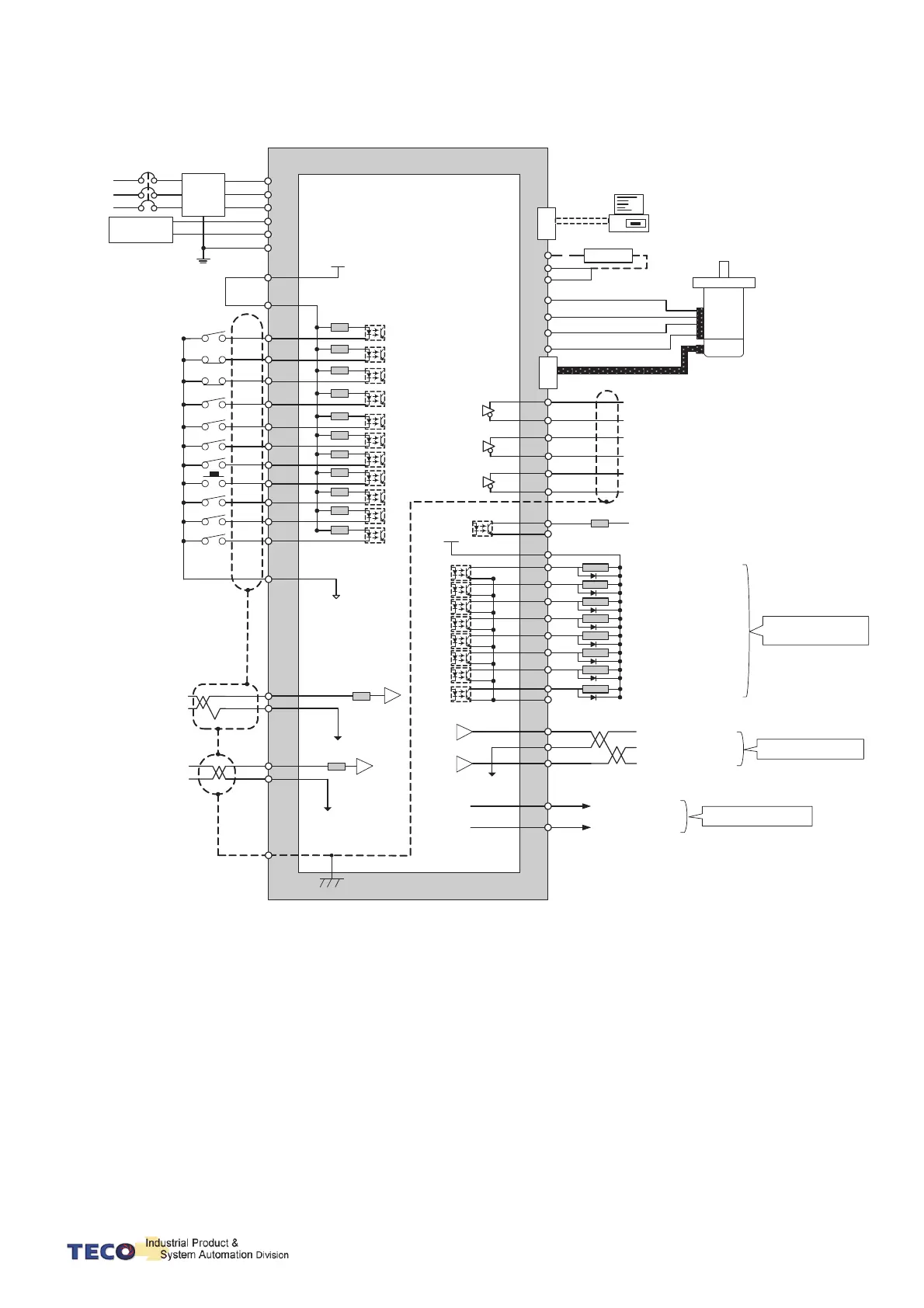
2-3-4 Speed Control Mode (S Mode)
U
1
R1
R1
R1
R1
R1
R1
R1
R1
R1
R1
4
5
9
3
6
7
2
8
10
48
DI-4
DI-5
IG24
TIC
AG
SIC
AG
FG
C
N
4
PC
RS232
PC
P1
P
V
W
FG
SERVO
MOTOR
C
N
2
35
36
37
38
39
40
43
44
Z0
DOCOM
*2
R4
+Vc
18
19
20
21
22
23
24
25
DC24V
45
44
LOAD
LOAD
LOAD
LOAD
LOAD
LOAD
LOAD
LOAD
DOCOM
*2
30
31
32
MON1
AG
MON2
33
34
+15V
- 15V
50
SERVO
R1
11
R2
26
29
R2
27
29
20K Ω
20K Ω
Analog Speed Input
(±10V)
NFB
DC 24V
R
S
T
r, 24V
s, 0V
R
S
T
FG
47
45
DI-1
DI-9
DI-3
DI-6
DI- 7
DI-2
DI-8
DI-10
DI-11
DO-1
DO-2
DO-3
DO-4
DO-5
DO-6
DO-7
DO-8
Look ( LOK)
Speed 1
(SP1)
(SP2)
Reverse Control
(
SPDINV
)
(SON)
(CCWL)
(CWL)
(EMC)
(PCNT)
Torque Limit
(TLMT)
Alarm Clear (ALRS)
PA
/PA
PB
/PB
PZ
/PZ
IP24
DICOM
Supply
Filter
Internal +24V DC
Digital input common
Servo ON
CCW Limit
CW Limit
Emergency stop
PI/P Switch
Speed 2
+24V ground
Torque Limit
Analog Ground
Analog Ground
Shield ground
Regeneration resistor
Encoder
Encoder Output A Phase
Encoder Output /A Phase
Encoder Output B Phase
Encoder Output /B Phase
Encoder Output /Z Phase
Encoder Output Z Phase
External supply
*Max Vc=24V
Vc=24V, R4=4.7KΩ
Vc=12V, R4=2.4KΩ
Vc=5V, R4=1.0KΩ
Servo Ready (RDY)
Alam(ALM)
Zero Speed (ZS)
In Speed (INS)
Limiting Torque/Alarm Code 0
P in Action/Alarm Code 1
Servo in limit/ Alarm Code 2
Base Block /Alarm Code 3
Max Voltage: 24V
Max Output Current :10mA
Analog Monitor Output 1
Analog Grounding
Analog Monitor Output 2
Max Output Voltage 5mA
+15V PW output (AG)
-15V PW output (AG)
Max Output Current 10mA
Control Power
Supply
Notes: 1. Pe mode =External pulse positioning command
2. DOCOM means common port of digital input
(DOCOM must connect to IG24 when using internal power supply)

 Loading...
Loading...
