All rights reserved 29 Servicemanual_UR3_en_rev3.1.2
3.1.13 Wrist 3 joint – Wrist 2 joint
Disassemble and assemble
Procedure for separating Wrist 3 joint from Wrist 2 is similar to separation of Wrist 2 joint and Wrist 1 joint,
consult chapter 3.1.12 Wrist 2 joint – Wrist 1 joint
3.1.14 Tool flange – Wrist 3 joint
Disassemble
For details and photos please see: 3.1.4 General guidance to separate joint from counterpart
1. Shut down the controller.
2. Remove black flexible flat ring with a tiny screwdriver and twist it around the joint housing.
3. Remove the plastic cover ring. 6 screws become visible. Loosen the screws.
4. Connect ESD wristband.
5. Pull the Tool flange and Wrist 3 joint gently apart.
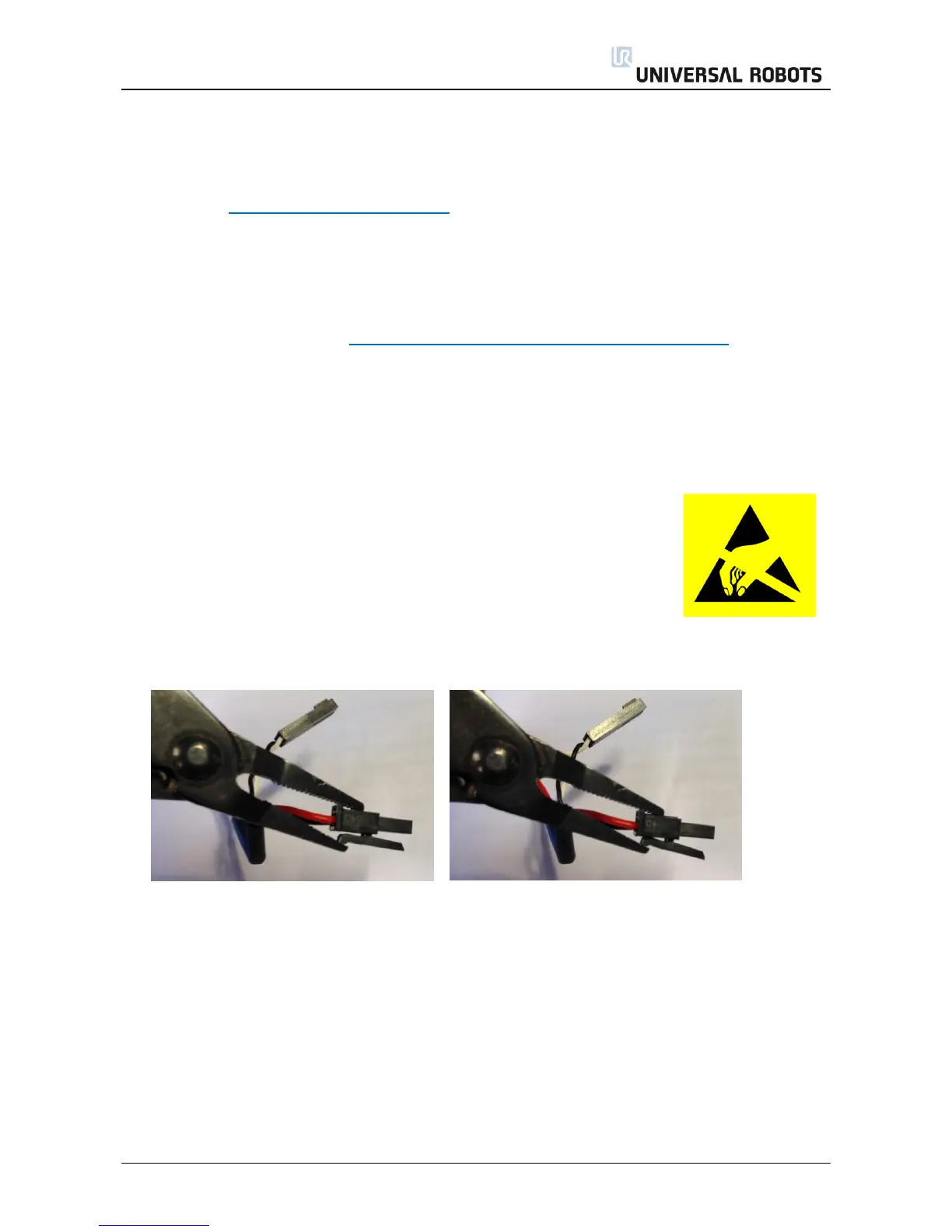
6. Disconnect wires.
Without bending the printed circuit board.
The power supply connector has a lock that has to be engaged before it is pulled out of the printed
circuit board.

 Loading...
Loading...








