All rights reserved 90 Servicemanual_UR3_en_rev3.1.2
5.3.3 Force limit protective stop
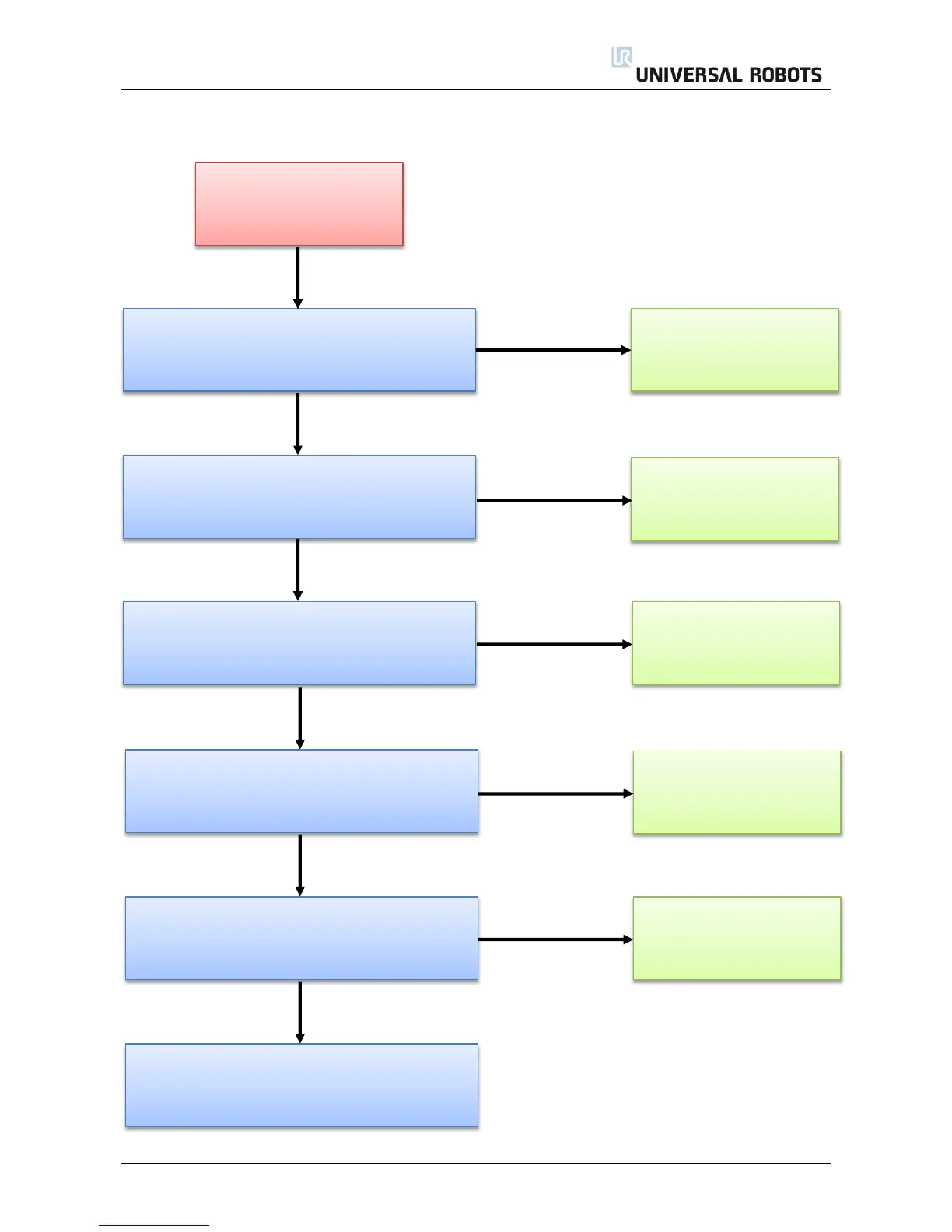
Force Limit Protective Stop
Is center of mass very different from tcp point?
Payload and tcp settings in Installation\TCP
Configuration must correspond with actual tool.
Are settings incorrect?
Are waypoints positioned very close to cylindrical
area around base of robot where robot can not
Adjust payload and tcp
settings
Adjust center of mass using
script code set_payload()
Is robot moving with excessive speed or
Press free drive button on back of TP and check
the free drive function of all joints > observe any
abnormal friction or behavior observed?
Inspect joint with abnormal
behavior, joint might have
Contact distributor from where robot has been
purchased

 Loading...
Loading...








