2 Reference information
2.7. Positions and directions of sensor
253HAC 022907-001 Revision: -
2.7. Positions and directions of sensor
General
This section details the mounting positions and directions for the
• sensor at reference plane
• sensor at each robot axis
When calibrating an axis with only one sensor, the sensor must first be positioned at the
reference plane of the robot in order to create reference values. This is further detailed in
section Resetting of Levelmeter 2000 and sensor on page 69. These reference values are then
used to calibrate the axes of the robot.
The reference sensor and the calibration sensor is consequently the same sensor used at
different locations.
When using the sensor as a reference at the base, it is fitted to a sensor fixture together with
a sensor plate, as shown in the figures below. The sensor has different directions at the base,
depending on which axis is calibrated. The directions are shown in the figures below.
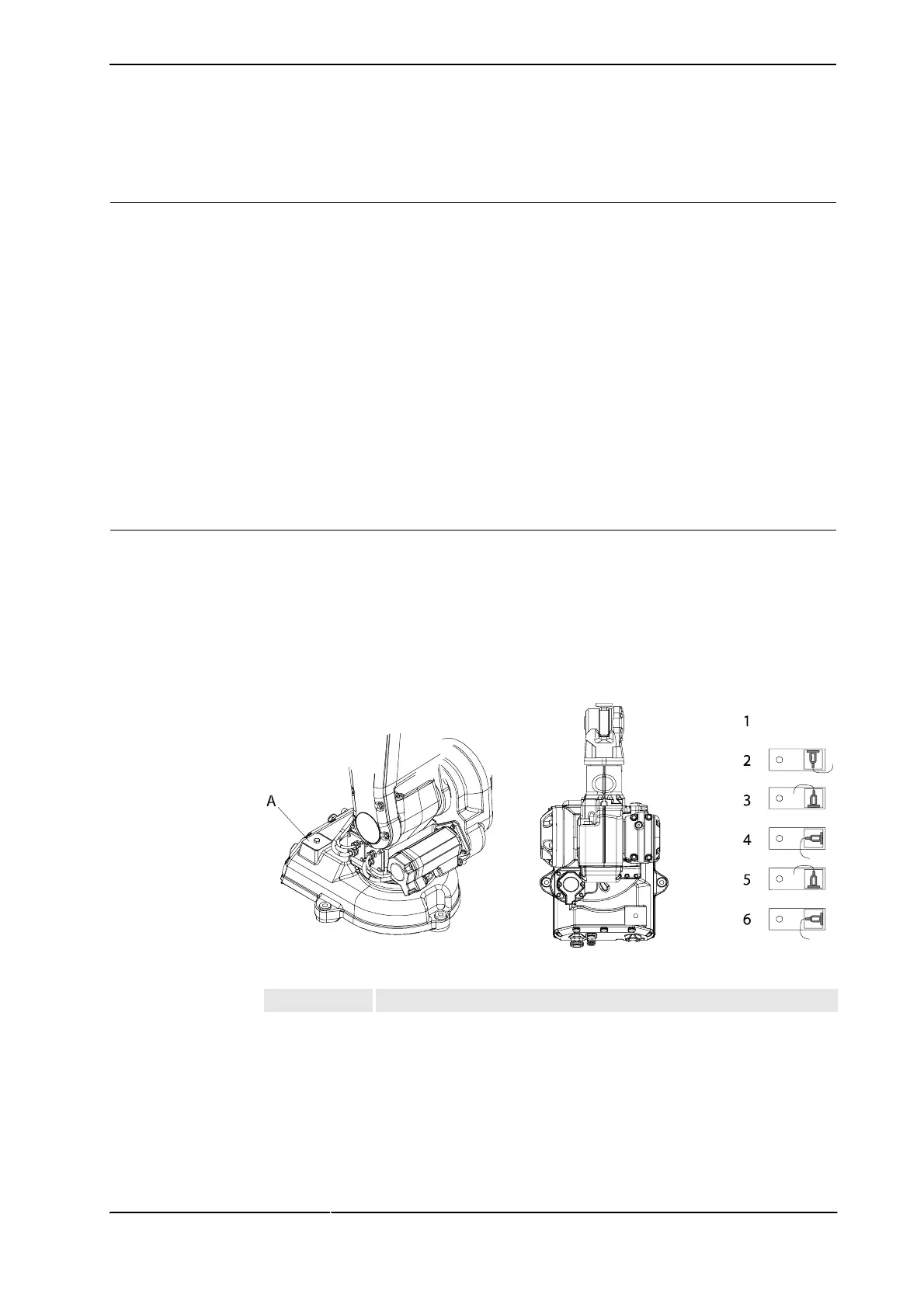
Sensor position and direction, IRB 140
This section specifies the position and alignment of the calibration sensor at the reference
plane and on each axis of IRB 140.
Calibration sensor at reference plane, all axes IRB 140
The calibration sensor is positioned and aligned at the reference plane as shown in the figure
below.
xx0200000141
A Reference plane
 Loading...
Loading...






