2 Reference information
2.6. Checking the calibration position
233HAC 022907-001 Revision: -
2.6. Checking the calibration position
General
Check the calibration position before beginning any programming of the robot system. This
may be done in one of two ways:
• Using a MoveAbsJ instruction with argument zero on all axes
• Using the Jogging window on the teach pendant
Using a MoveAbsJ instruction on the TPU, S4Cplus
This section describes how to create a program, which runs all the robot axes to their zero
position
Using a MoveAbsJ instruction on the FlexPendant, IRC5
This section describes how to create a program, which runs all the robot axes to their zero
position.
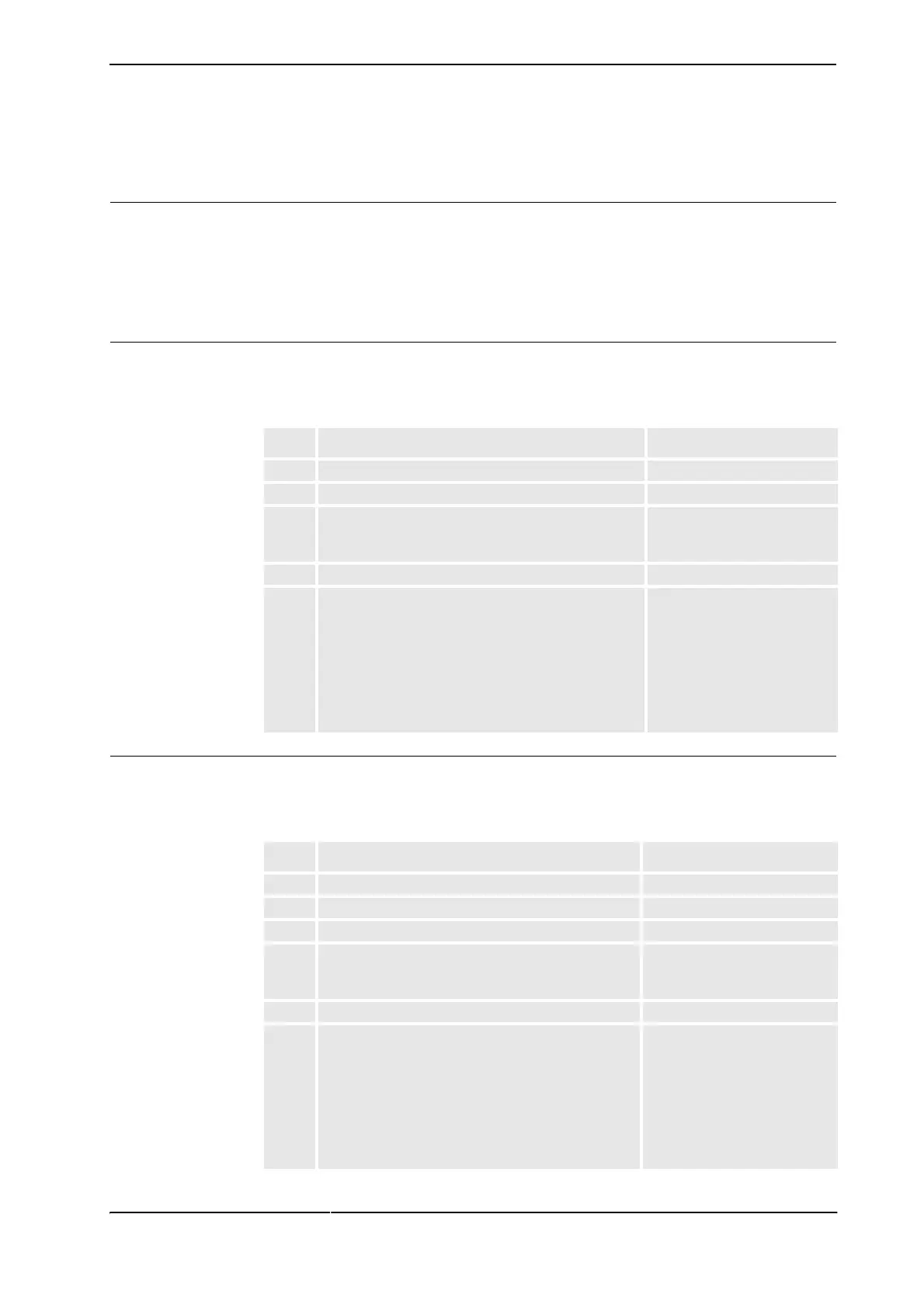
Step Action Note
1. Crate a new program
2. Use MoveAbsJ
3. Create the following program: MoveAbsJ
[[0,0,0,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]]\NoEOffs
, v1000, z50, Tool0
4. Run the program in manual mode
5. Check that the calibration marks for the axes align
correctly. If they do not, update the revolution
counters!
The calibration marks are
shown in section Calibration
scales and correct axis
position on page 16.
How to update the revolution
counters is detailed in section
Updating revolution counters
on page 72
Step Action Note
1. On ABB menu tap Program Editor.
2. Create a new program.
3. Use MoveAbsJ in the Motion&Proc menu.
4. Create the following program: MoveAbsJ
[[0,0,0,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]]\NoEOff
s, v1000, z50, Tool0
5. Run the program in manual mode.
6. Check that the calibration marks for the axes align
correctly. If they do not, update the revolution
counters!
The calibration marks are
shown in section Calibration
scales and correct axis
position on page 16.
How to update the revolution
counters is detailed in section
Updating revolution counters
on page 72.
 Loading...
Loading...






