3 Calibration
3.2. Calibration, axis 1, IRB 140
393HAC 022907-001 Revision: -
WARNING!
Be very careful when releasing the brakes during the following instructions The brakes must
be released and the axes become activated very quickly and may cause damage or personnel
injury.
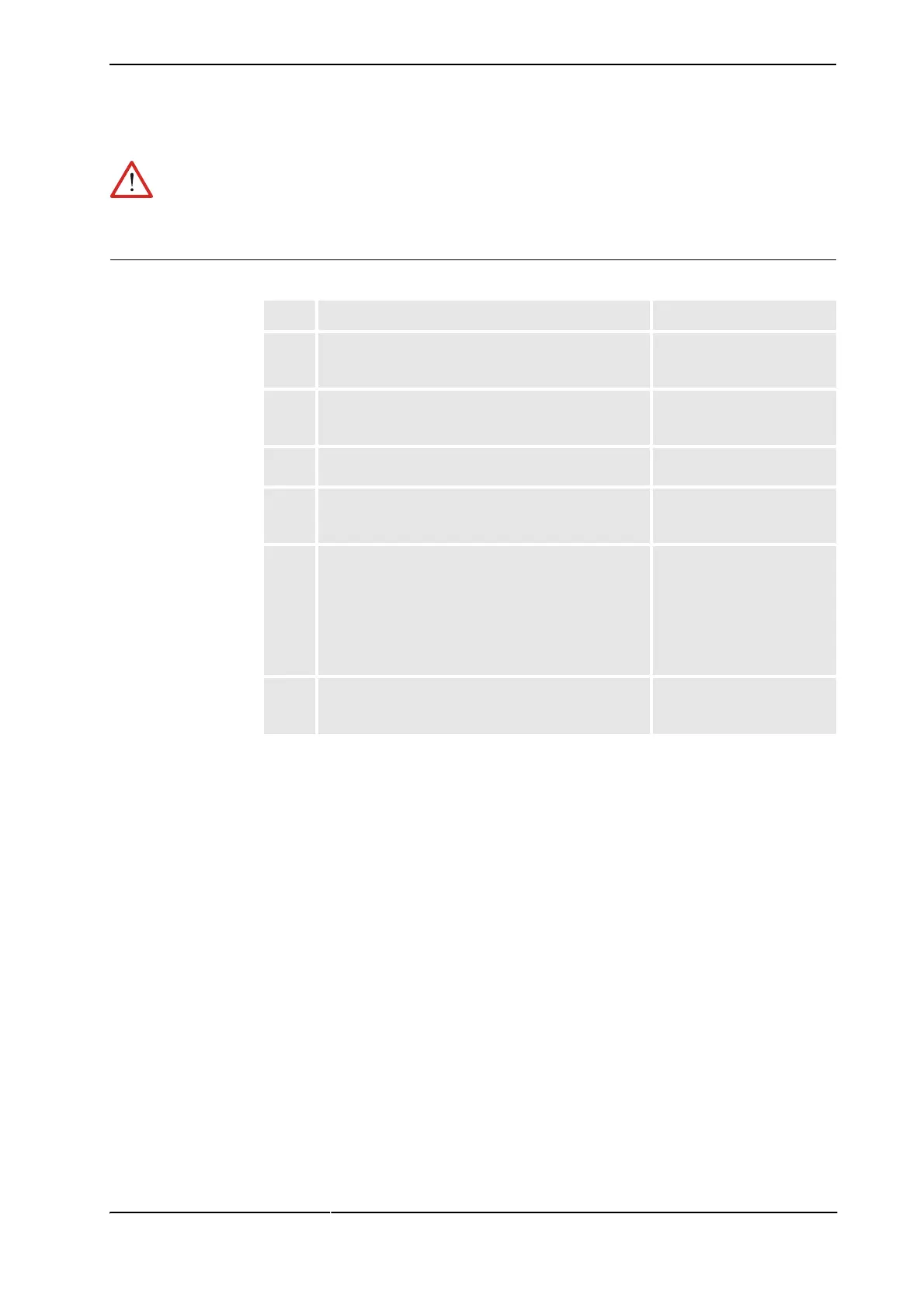
Calibration, axis 1
Step Action Note
1. Remove the cover plate on the reference surface on
the base of the manipulator. Clean the surface with
isopropanol and deburr it.
Art. no. is specified in
section Required equipment
on page 38.
2. Attach the calibration tool to the flat surface. Shown in section Location of
calibration tools, axis 1 on
page 38.
3. Turn the operating mode selector to MANUAL MODE
AT REDUCED SPEED.
4. Release the brakes and turn axis 1 by hand until the
pin, located under the axis 1 gearbox, fits in the
measuring slot on the tool.
5. Update only axis 1. Detailed in sections:
Fine calibration procedure
on TPU on page 65
(RobotWare 4.0).
Fine calibration procedure
on FlexPendant on page 67
(RobotWare 5.0).
6. Remove the calibration tool for axis 1 and refit the
cover plate on the reference surface, if no other
calibration is to be performed.
 Loading...
Loading...






