4 Repair
4.3.1. Replacement of cable harness
3HAC026660-001 Revision: C112
© Copyright 2006-2008 ABB. All rights reserved.
4.3 Complete manipulator
4.3.1. Replacement of cable harness
Location of cable harness
The cable harness is run through the robot from the base to the upper arm housing. The
location of the harness is shown in several figures, next to the procedures, later on in this
section.
Views of the cable harness may also be found in the chapter Spare parts and exploded views.
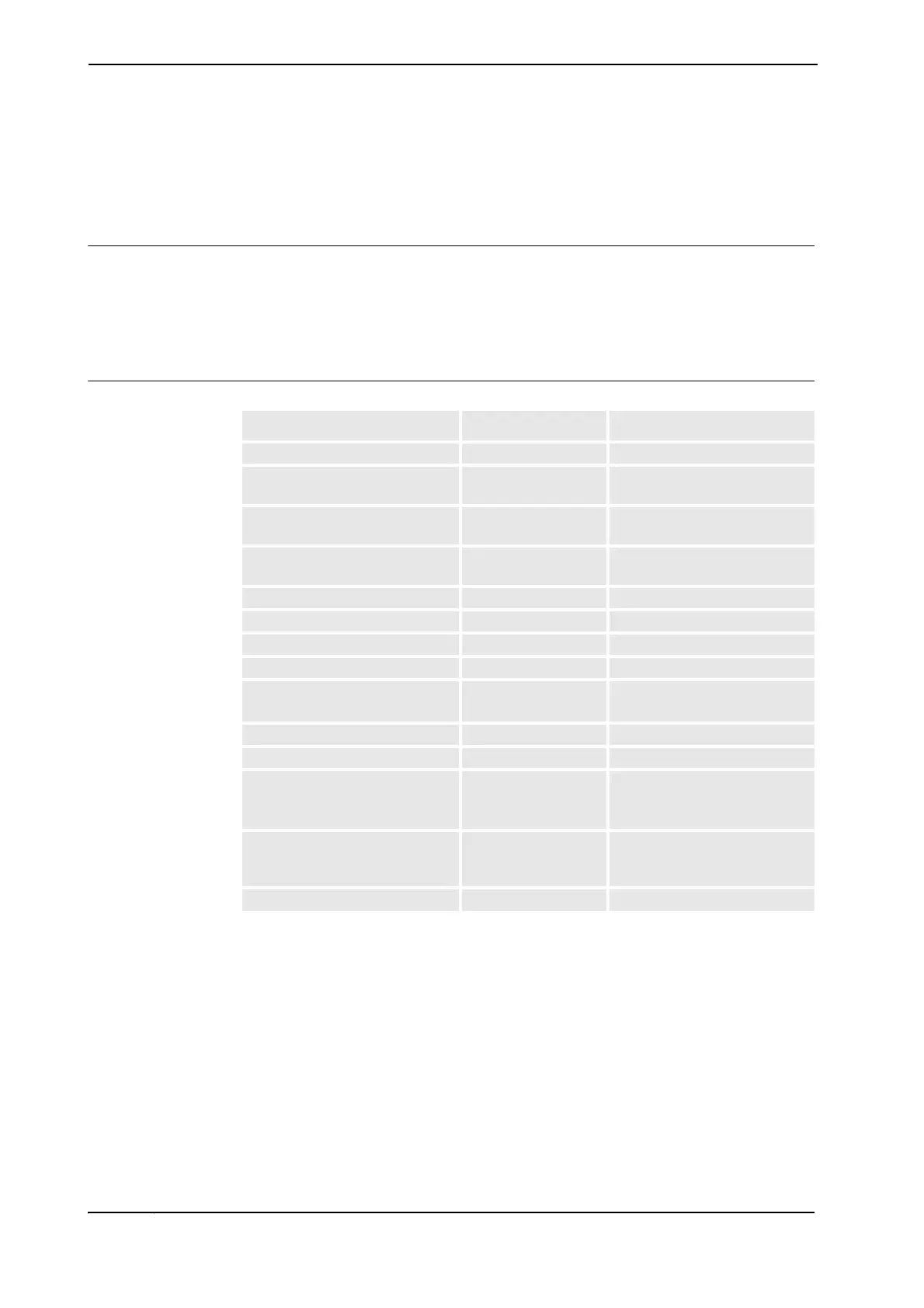
Required equipment
Equipment Spare part no. Note
Cable harness IRB 1600/1.45 3HAC 021827-001 No application interface.
Cable harness IRB 1600/1.45,
Customer connections
3HAC 021828-001
Cable harness IRB 1600/1.45,
Wire feeder
3HAC 021830-001
Cable harness IRB 1600/1.2,
Customer connections
3HAC 021828-003
Gasket, upper arm cover 3HAC 022049-001 Replace if damaged.
Gasket, customer connections 3HAC 022050-001 Replace if damaged.
Gasket, base cover 3HAC 022047-001 Replace if damaged.
Gasket, gearbox axis 1-2 3HAC 022048-001 Replace if damaged.
VK-cover 3HAA 2166-23 Upper and lower covers.
2 pcs
VK-cover 3HAA 2166-21 Middle cover.
Cable ties
Centering piece 3HAC025815-001 Fitted to the push button unit in
order to align it correctly.
Replace if damaged.
Standard toolkit The contents are defined in
section Standard toolkit on page
237.
Circuit diagram See chapter Circuit diagram.
Continues on next page
 Loading...
Loading...






