4 Repair
4.6.2. Replacement of motor, axis 2
1813HAC026660-001 Revision: C
© Copyright 2006-2008 ABB. All rights reserved.
4.6.2. Replacement of motor, axis 2
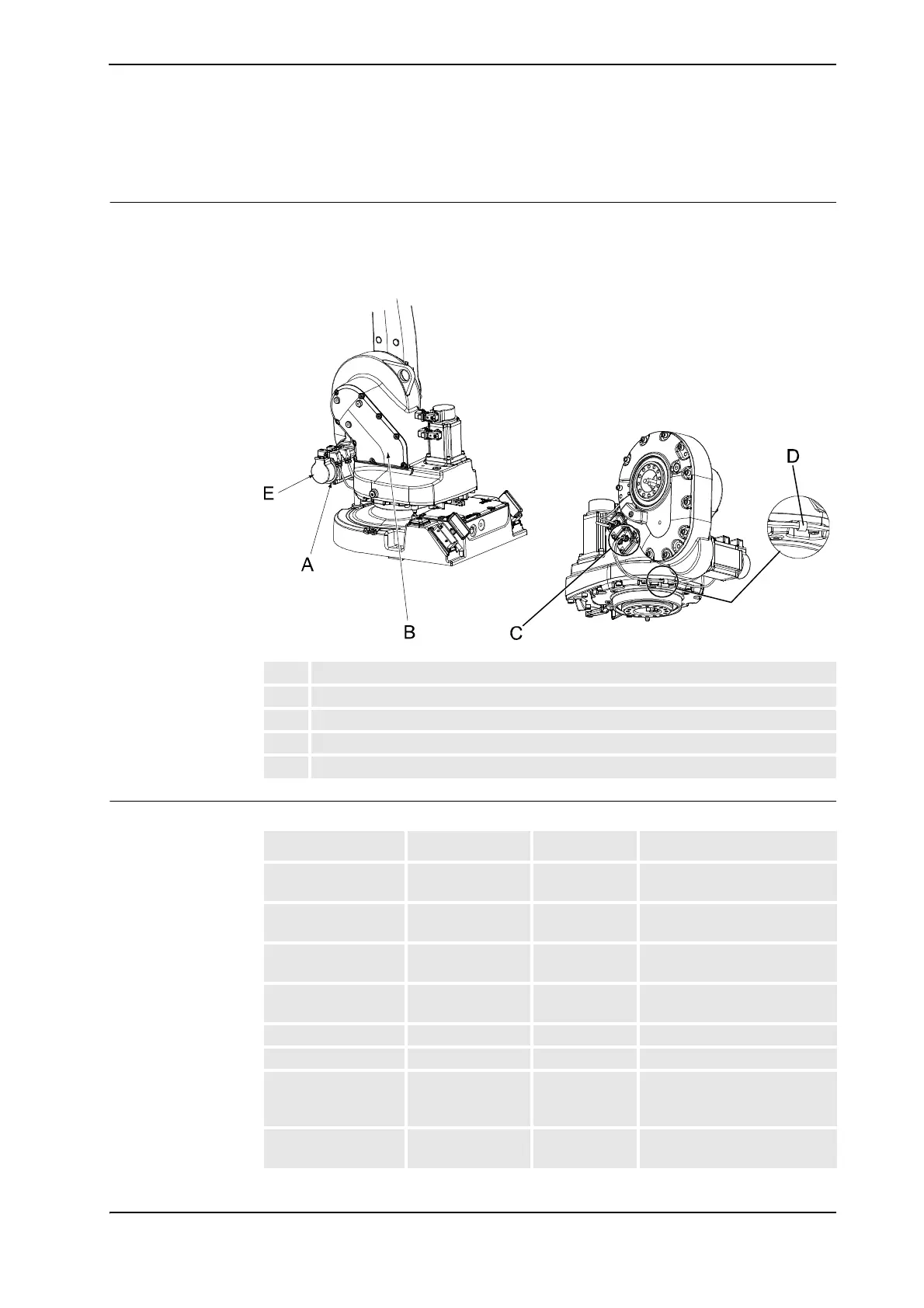
Location of motor axis 2
The motor axis 2 is located on the front of the robot as shown in the figure below.
A more detailed view of the motor and its position may be found in the spare part view Frame,
exploded view on page 247 in part 2 of the Product manual.
xx0400001257
Required equipment
A Motor, axis 2
B Cover, frame
C Connector plate for motor cabling
D Bracket and cable tie
E Motor cover
Equipment, etc. Spare part no. Art. no. Note
Rot. ac motor incl.
pinion, spare
3HAC 023557-001 Cable harness, motor axes 1-2
must be ordered separately.
Cable harness, motor
axes 1-2
3HAC 023754-001
O-ring 21522012-428 Must be replaced when
replacing motor.
Gasket, gearbox axis
1-2
3HAC 022048-001 Replace if damaged.
Grease 3HAB 3537-1 For lubricating the o-ring.
Isopropanol - For cleaning mating surfaces.
Standard toolkit - The contents are defined in
section Standard toolkit on
page 237.
Rotation tool, motor 3HAC022266-
003
For adjusting the gear play,
motor/pinion
Continues on next page
 Loading...
Loading...






