NCAN-02 Installation and Start-up Guide 6-1
Chapter 6 – Communication
Overview
This chapter describes the communication on a CANopen network.
CAN Data Frame
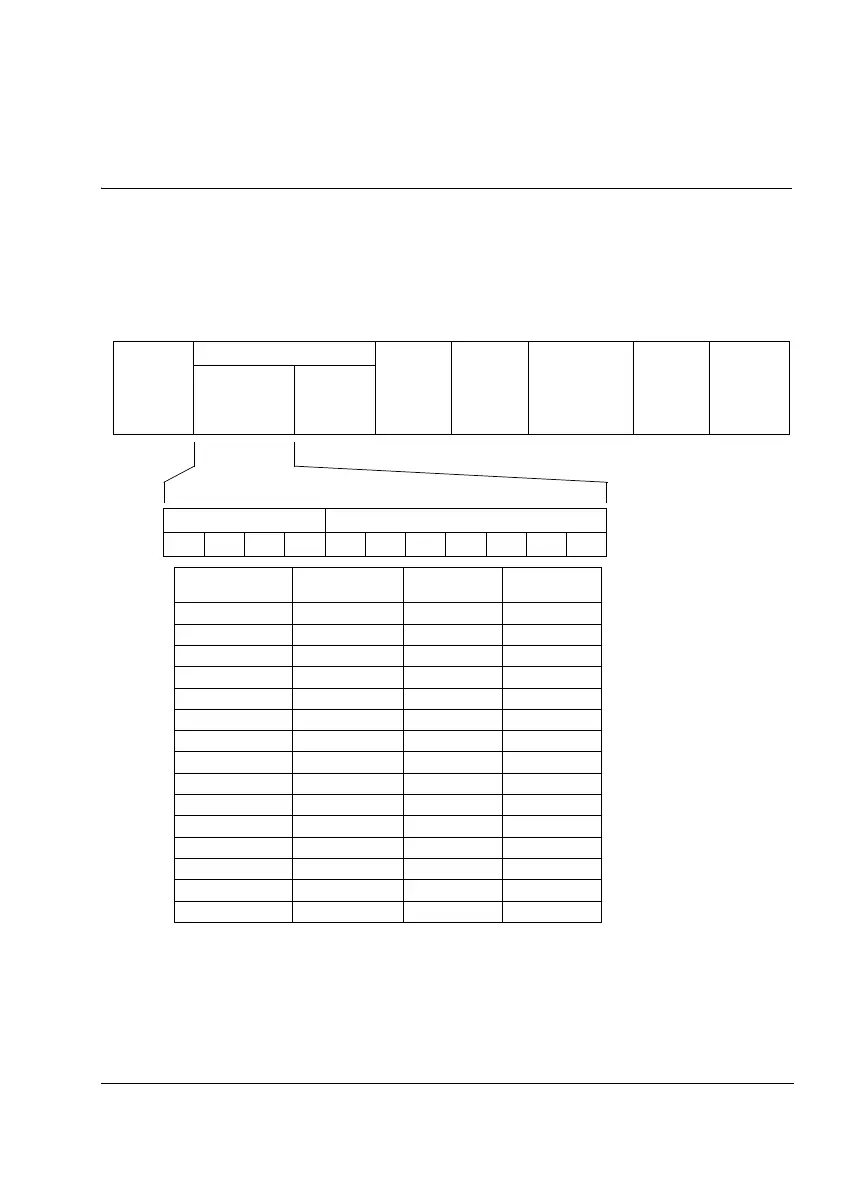
CAN employs data frames for transferring data between the host
(controller) and the nodes on the bus. The following figure presents the
structure of the data frame.
Inside the CANopen data frame, different types of Communication
Objects are used to convey the data. Process Data Objects (PDO) are
used for transmitting time-critical process data (references, control
commands, status information); Service Data Objects (SDO) are used
for less time-critical data, e.g. parameters. In addition, there are Special
Function Objects and Network Management Objects.
START OF
FRAME
1 BIT
ARBITRATION FIELD
COMM.
11 OR 29 BITS
REMOTE
TRANS-
MISSION
REQUEST
1 BIT
CONTROL
FIELD
6 BITS
DATA
FIELD
0 TO 8 BYTES
CYCLICAL
REDUNDANCY
CHECK
16 BITS
ACKNOWL-
EDGE
FIELD
2 BITS
END OF
FRAME
7 BITS
FUNCTION CODE NODE ID
109876543210
Communication
Object
Function Code
(Binary)
COB ID
(Hex)
COB ID
(Dec)
NMT 0000 0×00 0
SYNC 0001 0×80 128
TIME STAMP 0010 0×100 256
EMERGENCY 0001 0×81 … 0×FF 129 … 255
PDO 1 (Tx) 0011 0×181 … 0×1FF 385 … 511
PDO 1 (Rx) 0100 0×201 … 0×27F 513 … 639
PDO 2 (Tx) 0101 0×281 … 0×2FF 641 … 767
PDO 2 (Rx) 0110 0×301 … 0×37F 769 … 895
PDO 3 (Tx) 0111 0×381 … 0×3FF 897 … 1023
PDO 3 (Rx) 1000 0×401 … 0×47F 1025 … 1151
PDO 4 (Tx) 1001 0×481 … 0×4FF 1153 … 1279
PDO 4 (Rx) 1010 0×501 … 0×57F 1281 … 1407
SDO (Tx) 1011 0×581 … 0×5FF 1409 … 1535
SDO (Rx) 1100 0×601 … 0×67F 1537 … 1663
NODEGUARD 1110 0×701 … 0×77F 1793 … 1919
OBJECT ID
(COB ID)
 Loading...
Loading...










