&DOLEUDWLRQ
3.1. Different functions in the calibration service routine
373HAC 16578-1 Revision: E
© Copyright 2003-2007 ABB. All rights reserved.
&DOLEUDWLRQ
'LIIHUHQWIXQFWLRQVLQWKHFDOLEUDWLRQVHUYLFHURXWLQH
7\SHVRIFDOLEUDWLRQ
The calibration service routine consists of two different parts:
• Calibration Pendulum II (robot home position, CalPend)
• Reference Calibration (RefCal). Only for M2004 robot systems.
(YROXWLRQRYHUYLHZ
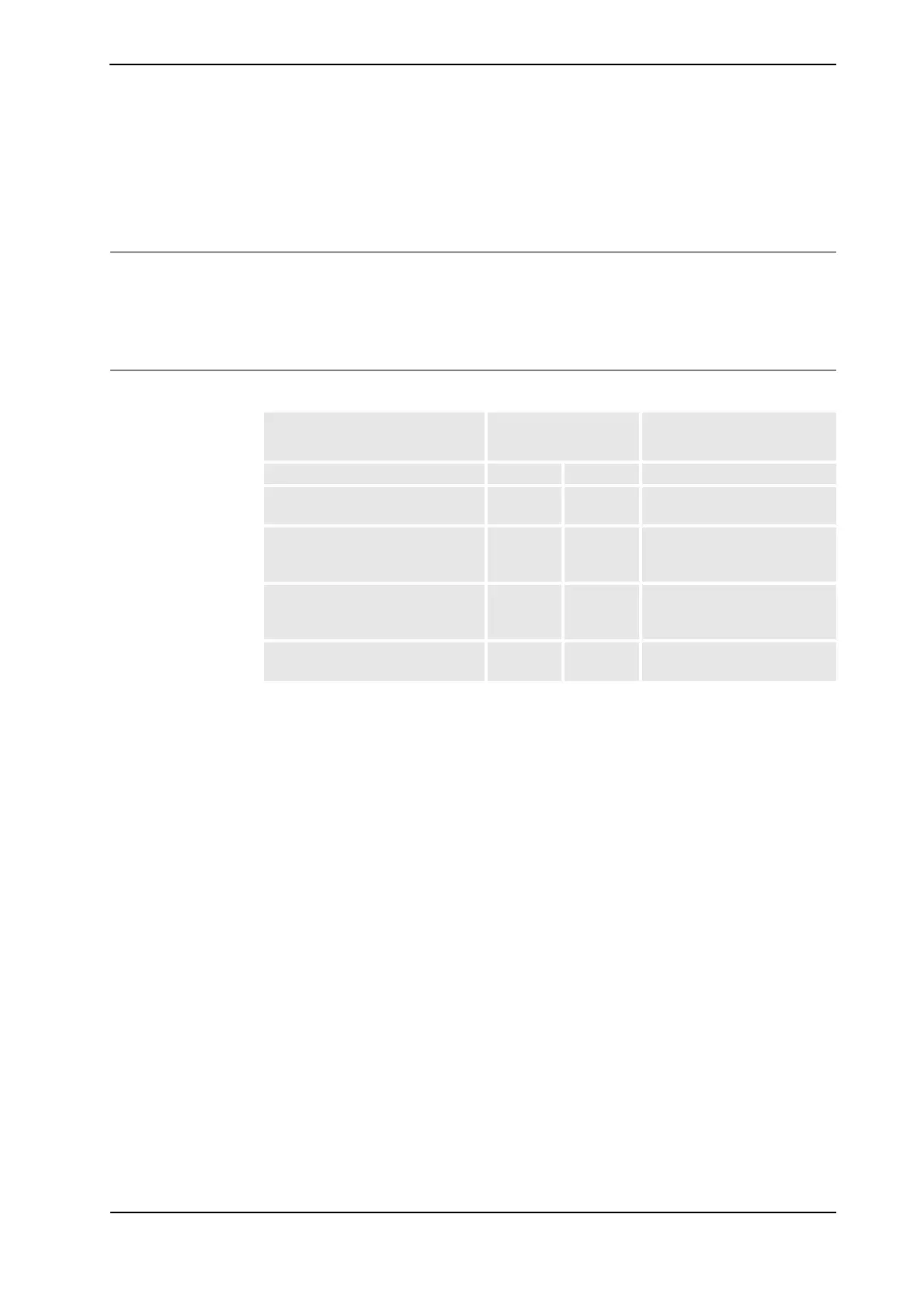
The table below shows the introduced functions in the calibration service routine.
)XQFWLRQ
,QFOXGHGLQVHUYLFH
URXWLQHDVIURP
1RWH
0 0
Calibration of sensors and
Levelmeter 2000
4.0.110 5.0.5 Done manually in earlier
releases.
Automatic fine calibration 4.0.100 5.0.7 Switching of windows and
performing manual fine
calibration no longer needed.
New high performance calibration
routine (called flip-flop) for IRB
6600/6650/7600
4.0.110 5.0.5 Eliminates calibration of axis
3/4 on the upper arm.
Reference calibration not
available
5.0.7 Only valid for 6-axis robots.