&DOLEUDWLRQ
3.2.2. Preparing the calibration procedure, CalPend
393HAC 16578-1 Revision: E
© Copyright 2003-2007 ABB. All rights reserved.
3UHSDULQJWKHFDOLEUDWLRQSURFHGXUH&DO3HQG
*HQHUDO
This section details all required preparations for performing Calibration Pendulum II
(CalPend).
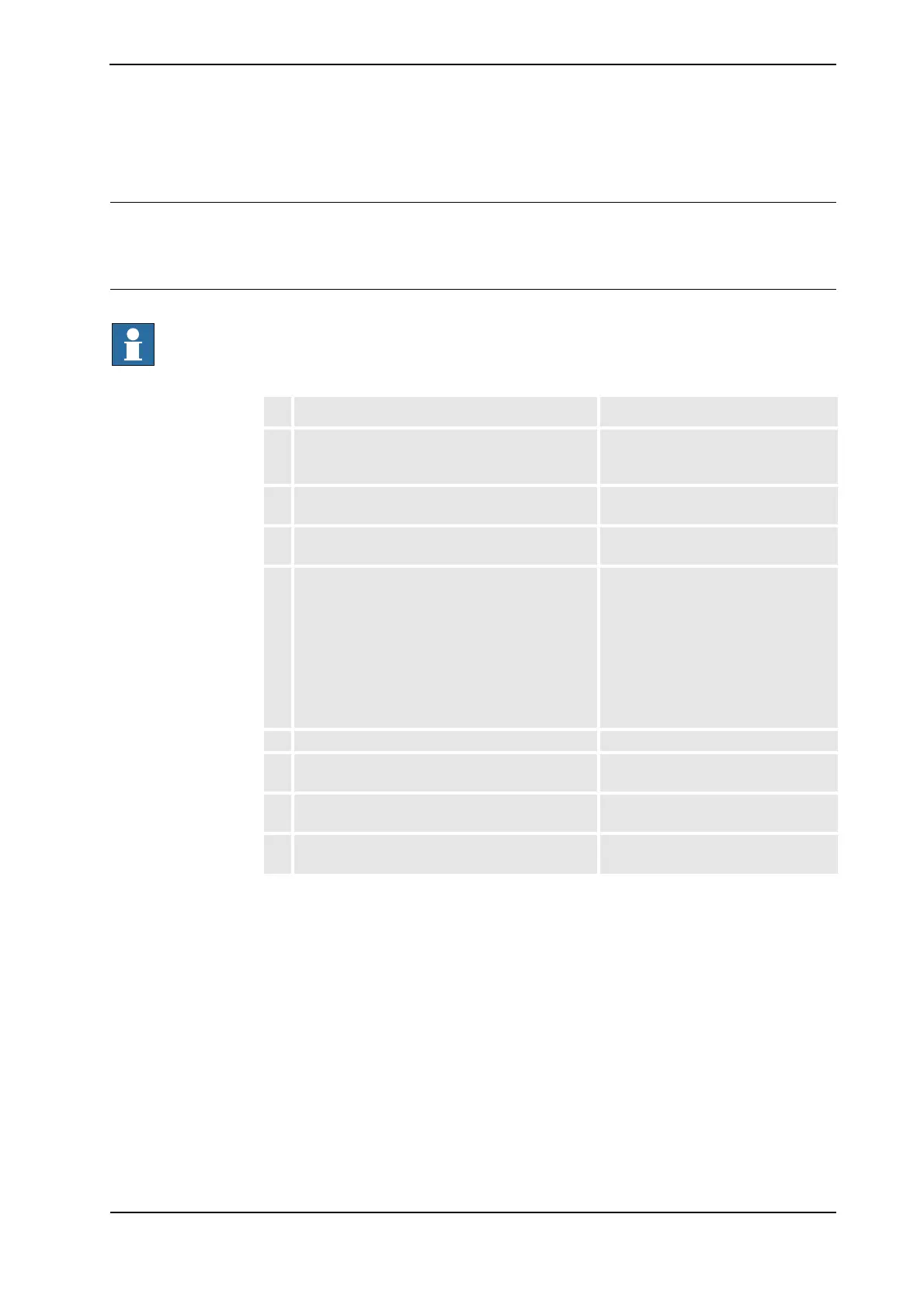
3UHSDUDWLRQVIRUFDOLEUDWLRQSURFHGXUH
127(
%HIRUHXVHRIWKH3HQGXOXP&DOLEUDWLRQDOOH[WHUQDOD[LV!PXVWEHGLVFRQQHFWHG
RQO\UHTXLUHGIRU5RERW:DUHRUHDUOLHU
$FWLRQ 1RWH
1. Make sure the robot is prepared for calibration.
(i.e. all service or installation activities are
completed and the robot is ready to run.)
Detailed in the 3URGXFWPDQXDO for
each robot.
2. Check that all required hardware is available for
calibrating the robot.
Specified in section (TXLSPHQWIRU
FDOLEUDWLRQSHQGXOXPRQSDJH.
3. Remove all peripheral equipment from the upper
arm of the robot (eg. tools and dresspack).
4. Remove all the covers for the surfaces where to
fit the calibration and reference sensors and
clean them with isopropanol.
1RWH The same calibration pendulum is used as
a calibration sensor and as a reference sensor
depending on its function at the time. In the
calibration procedure the pendulum will be called
calibration sensor or reference sensor
depending on its function at the time.
Mounting locations of reference and
calibration sensors are shown in
section &DOLEUDWLRQVHQVRUPRXQWLQJ
SRVLWLRQV&DO3HQGRQSDJH.
5. Clean the guide pin holes. Use isopropanol.
6. Connect the calibration equipment to the robot
controller and start up the Levelmeter 2000.
Specified in section 6WDUWXSRI
/HYHOPHWHURQSDJH.
7. Calibrate the robot. Detailed in section &DOLEUDWLRQDOO
D[HV&DO3HQGRQSDJH.
8. Verify that the calibration was successfully
carried out.
Detailed in 3RVWFDOLEUDWLRQSURFHGXUH
RQSDJH.
 Loading...
Loading...







