*HQHUDOLQIRUPDWLRQ
1.1. To what robots does this apply?
73HAC 16578-1 Revision: E
© Copyright 2003-2007 ABB. All rights reserved.
*HQHUDOLQIRUPDWLRQ
7RZKDWURERWVGRHVWKLVDSSO\"
6HULDOQXPEHUV
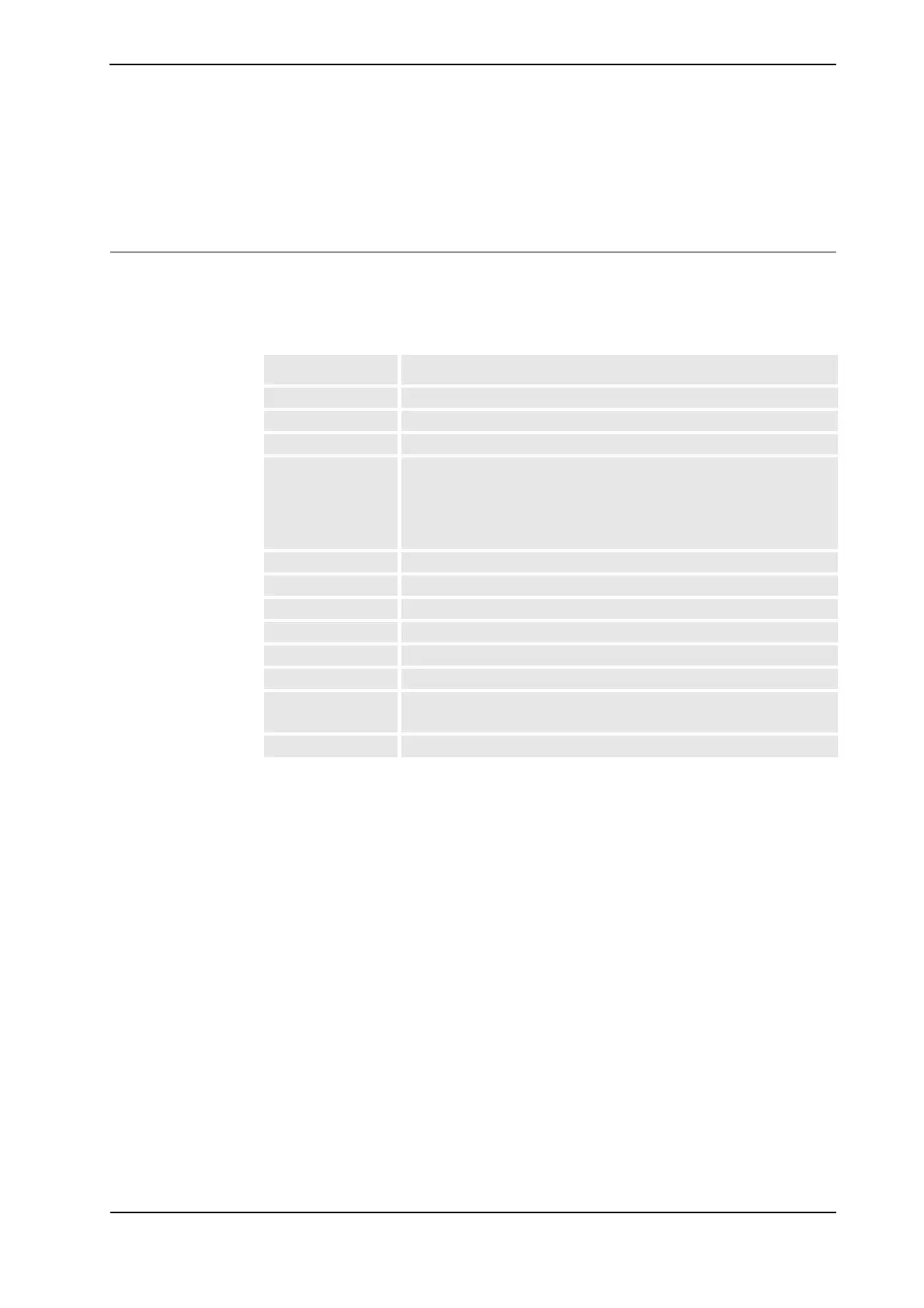
Robots, in general, may be calibrated using a number of methods. This manual describes
robot calibration using the Calibration Pendulum method, which is applicable to the
following ABB robots:
5RERWPRGHO 6HULDOQXPEHU
IRB 140 14M-21493
IRB 1400 14-26001
IRB 1600 All robots.
IRB 2400 M2000 24-23050 and on.
Robots with serial numbers 24-23051, 24-23052, 24-23054, 24-23055,
24-23056 and 24-23061 were not calibrated using the calibrations
pendulum method before delivery from ABB, but these robots are fully
compatible with this method.
IRB 260 All robots.
IRB 4400 M2000 44-21782 and on.
IRB 4450S All robots.
IRB 660 All robots.
IRB 6600/6650 All robots.
IRB 6600ID/6650ID All robots.
IRB 7600 76-20187 and on.
127( Robots 76-20190 and 76-20191 are H[FOXGHG!
IRC5 M2004 All robots using IRC5 controller.
 Loading...
Loading...







