&DOLEUDWLRQ
3.3.4. Preparing the calibration procedure, RefCal
793HAC 16578-1 Revision: E
© Copyright 2003-2007 ABB. All rights reserved.
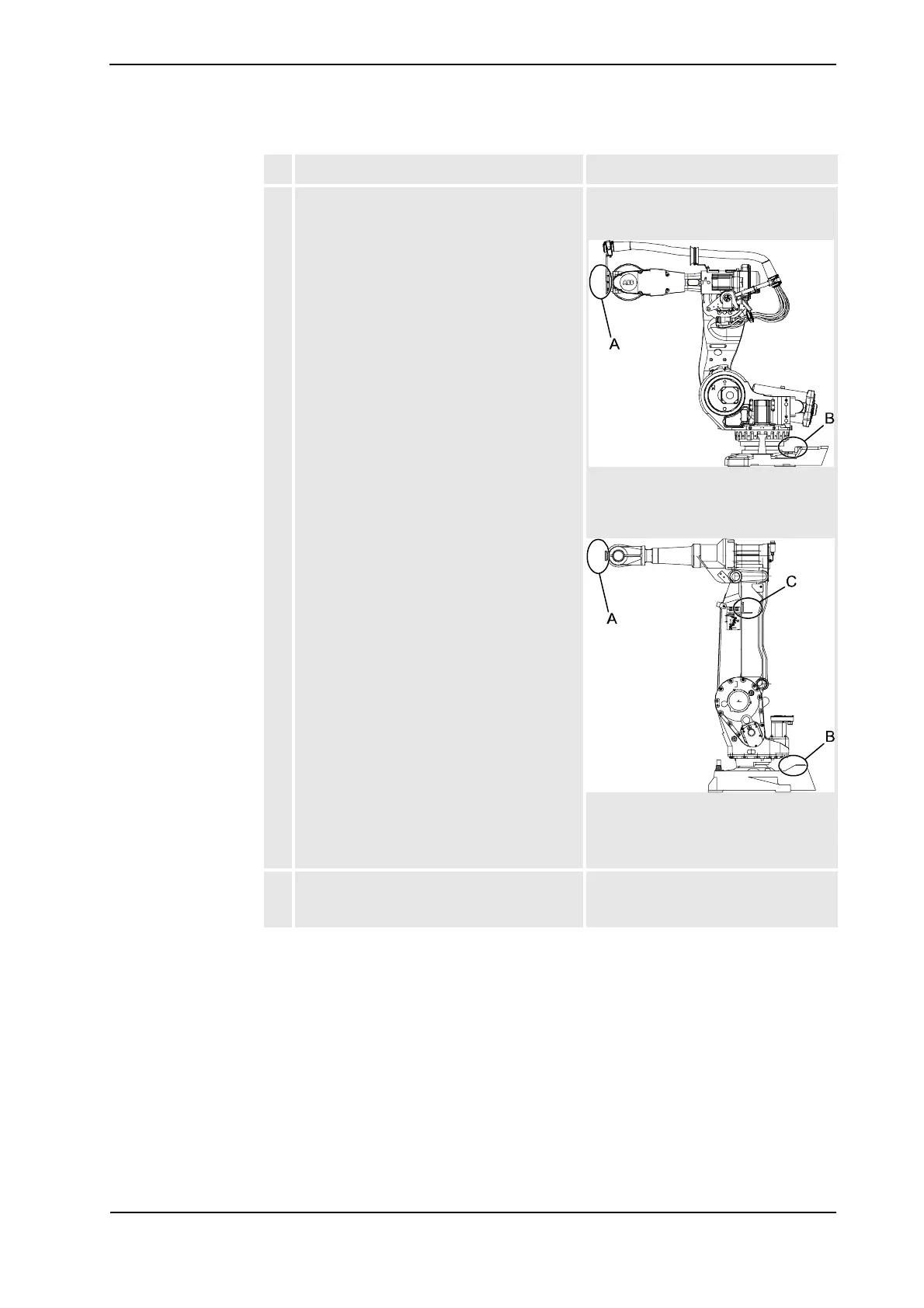
7. Remove all the covers from the reference
surfaces and clean them with isopropanol.
Reference surfaces for bending
backward robots (IRB 1600, 6600,
6650, 6650S, 7600):
xx0500002471
Reference surfaces for parallel rod
robots (IRB 140, 1400, 2400, 4400,
4450S):
xx0500002471
A. Reference surface at the tool.
B. Reference surface at the base.
C. Reference surface of axis 2.
8. Calibrate the robot. Detailed in section &DOLEUDWLRQRID[HV
XVLQJSUHGHILQHGUHIHUHQFHYDOXHV
RQSDJH.
$FWLRQ 1RWH
&RQWLQXHG
 Loading...
Loading...







