3.6.6 PID
3.6.6.1 Speed PID Control
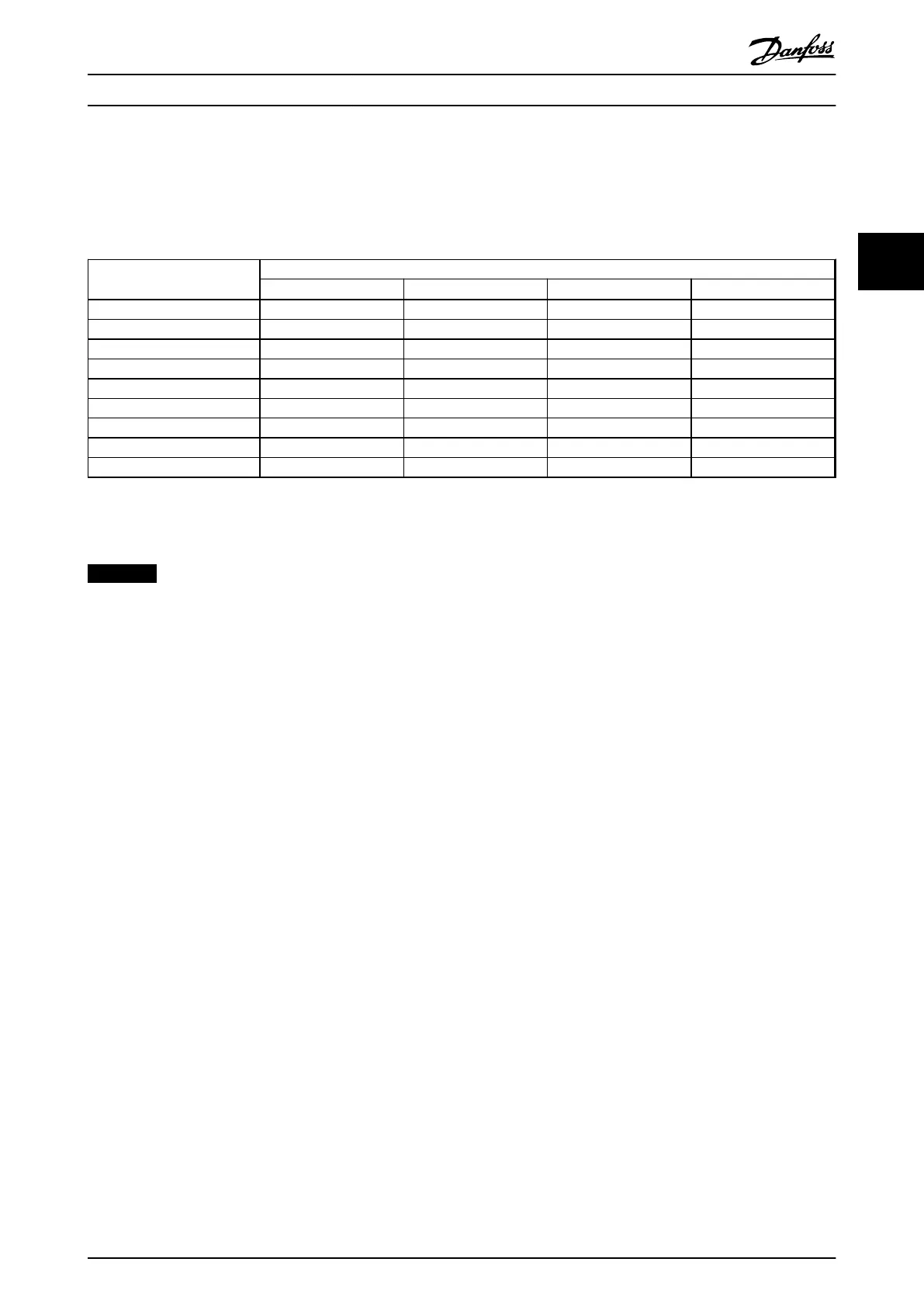
Speed PID Control maintains a constant motor speed regardless of the changing load on the motor.
1-00 Configuration Mode
1-01 Motor Control Principle
U/f
VVC
+
Flux Sensorless Flux w/ enc. feedb
[0] Speed open loop ACTIVE ACTIVE ACTIVE N.A.
[1] Speed closed loop N.A. Not Active N.A. ACTIVE
[2] Torque N.A. N.A. N.A. Not Active
[3] Process Not Active Not Active Not Active N.A.
[4] Torque open loop N.A. Not Active N.A. N.A.
[5] Wobble Not Active Not Active Not Active Not Active
[6] Surface Winder Not Active Not Active Not Active N.A.
[7] Extended PID Speed OL Not Active Not Active Not Active N.A.
[8] Extended PID Speed CL N.A. Not Active N.A. Not Active
Table 3.1 Control Configurations with Active Speed Control
“N.A.” means that the specific mode is not available at all. “Not Active” means that the specific mode is available but the Speed Control is not
active in that mode.
NOTICE
The Speed Control PID works under the default parameter setting, but tuning the parameters is highly recommended to
optimise the motor control performance. The 2 Flux motor control principles are particularly dependant on proper
tuning to yield their full potential.
Table 3.2 sums up the characteristics that can be set-up for speed control. See VLT
®
AutomationDrive FC 301/FC 302
Programming Guide for details on programming.
Basic Operating Principles
VLT
®
AutomationDrive FC 301/FC 302 Design Guide, 0.25-75 kW
MG33BF02 - Rev. 2013-12-20 23
3 3
 Loading...
Loading...













