Chapter 12 Descriptions of Parameter SettingsC2000 Plus
12.1-10-2
When Pr.10-00 = 8, PG card detects the number of rotation laps. If the application is Rotation
axis (Pr.10-60 bit 4–7, coordinate system type = 1 (Rotation axis 1) or 2 (Rotation axis 2)), the
maximum rotation number of the encoder and the overflow signal EcOF display. Therefore, for
this application, it is recommended to set Pr.10-60 bit8–11 (Encoder overflow treatment) to 2:
No warn and continue to operate.
10-01
Encoder Pulses per Revolution
Default: 600
Settings 1–65535
This parameter sets the encoder pulses per revolution (ppr). It is a feedback control signal source
when using PG. The encoder sets the number of pulses for the motor rotating through one
rotation. The A/B phase cycle generates the pulse number.
This setting is also the encoder resolution. The speed control is more accurate with higher
resolution.
If you set this parameter incorrectly, it may cause motor stall, drive over-current, or a permanent
magnetic pole origin detection error for the PM in closed-loop control. When using the PM, you
must perform the magnetic pole origin detection (Pr.05-00 = 4) again if you modify the content
of this parameter.
The hardware bandwidth of EMC-PG01L and EMC-PG01O is 300 kHz. Take a two-pole pairs IM
as example, if you choose a 1024 ppr encoder, the maximum operation frequency for closed-
loop control is 300k ÷ 1024 × 2 poles pairs = 586 kHz; in other words, one-pole pairs motor can
only work under 293 Hz and below. To work with higher frequency, you need to choose an
encoder with lower distinguish ability or enable Pr.11-00 bit11 = 1 (Switch between IMFOCPG
and IMVF modes).
In V/F mode, if you set the parameters for number of poles, encoder and mechanical gear ratio
correctly, and set Pr.00-04 = 7, the keypad displays the motor speed (including direction) that
detected by the encoder, which could be the inspection method when an error occurs to the
FOCPG operation.
When Pr.10-00 = 8, it only supports encoders with resolution that is smaller than 17bit. The
default for Pr.10-01 is 32768, which is only applicable for encoders with 17bit resolution. If the
encoder resolution is not 17bit, set Pr.10-01 to encoder resolution divided by 4.
For example: Encoder resolution = 16 bit, then 2
16
= 65536, 65536 ÷ 4 = 16384. Set Pr.10-01 =
16384.
10-02
Encoder Input Type Setting
Default: 0
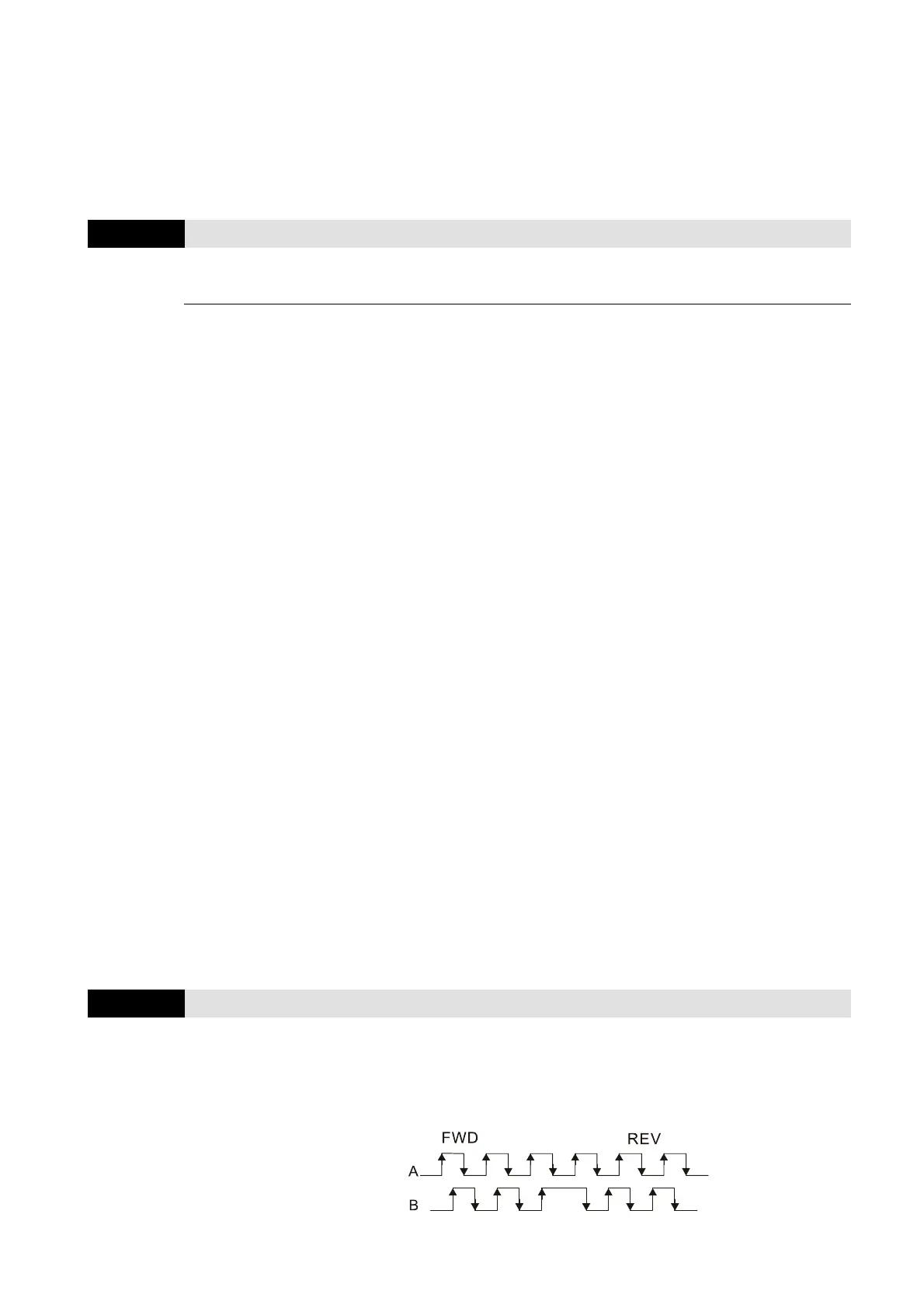
Settings 0: Disabled
1: A / B phase pulse input, run forward if A-phase leads B-phase by 90
degrees.
 Loading...
Loading...



