Chapter 12 Descriptions of Parameter SettingsC2000 Plus
12.1-10-3
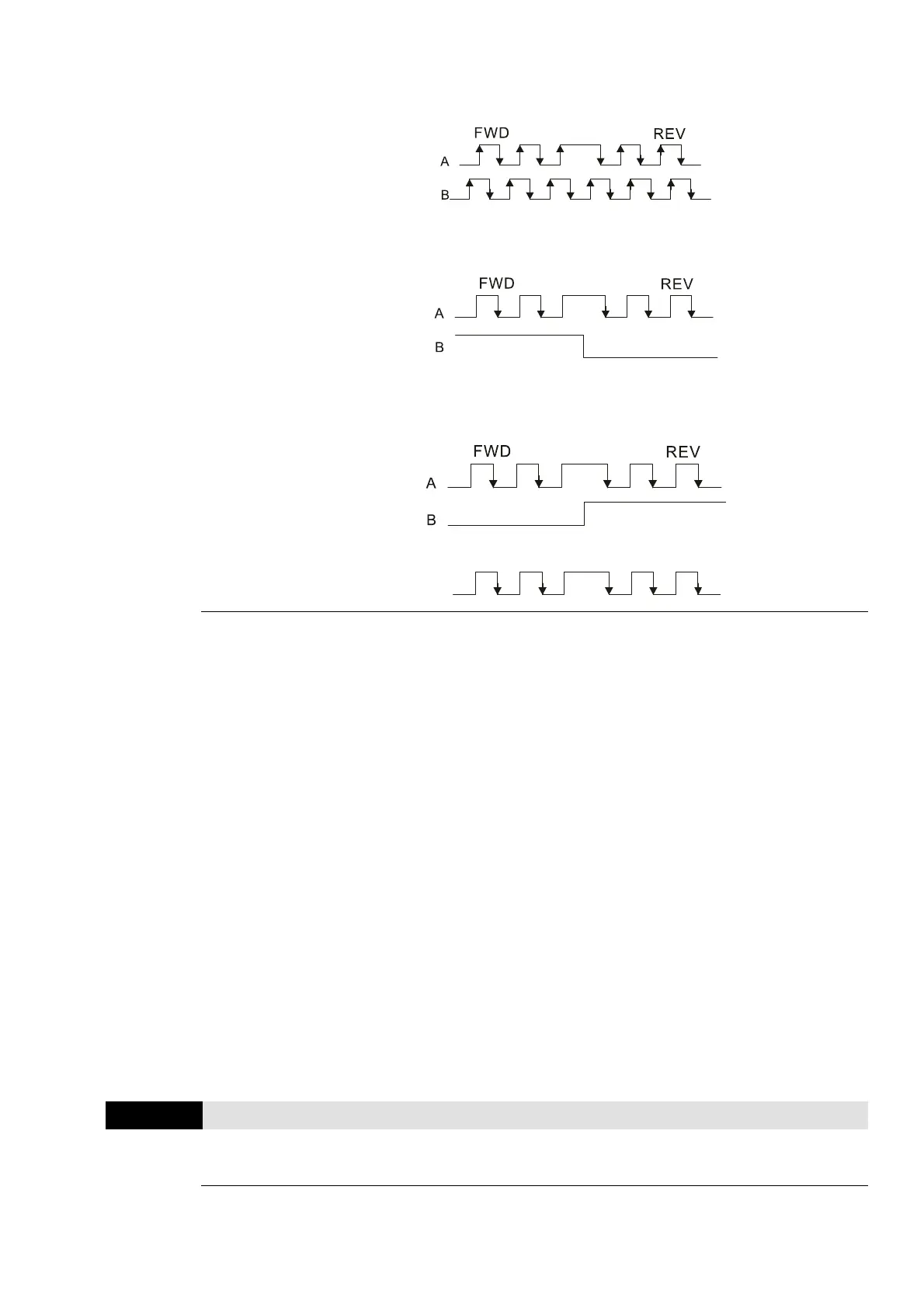
2: A / B phase pulse input, run forward if B-phase leads A-phase by 90
degrees.
3: A-phase is a pulse input and B-phase is a direction input
(L = reverse direction, H = forward direction).
4: A-phase is a pulse input and B-phase is a direction input
(L = forward direction, H = reverse direction).
5: Single-phase input
A
Position control: the PG2 pulse affects the PG1 pulse tracking position.
1. When PG2 is single-pulse, and PG1 is A / B phase pulse, the frequency of position control
should be (input pps × 2) ÷ (PG1 ppr × 4) at constant speed.
2. When PG2 and PG1 are either single-pulse (or both A / B phase pulse), the frequency of
position control should be (input pps × 2) ÷ (PG1 ppr × 2) at constant speed.
3. Due to the edge trigger of the pulse input, the input of A / B phase pulse should be read as 4
times of the frequency; and the single-phase input should be read as twice of the frequency.
For inputs with the same pps, the single-phase tracking frequency will be half of the double-
phase frequency.
Velocity control: PG2 acts according to the setting for Pr.10-01 (PG1 ppr), and will not be affected
by PG1 pulse (single-phase input or A / B phase pulse). When the setting for Pr.10-00, Pr.10-01
and Pr.10-02 are changed, cycle the power of the motor drive.
1. The speed formula is (input ppr) ÷ (PG1 ppr), when PG1 ppr = 2500, PG2 is single-phase
input, and the input pps is 1000 (1000 pulse per second), the speed should be (1000 ÷ 2500)
= 0.40 Hz.
2. The same pps inputs of A/B phase pulse or single-phase pulse input should get the same
frequency command.
10-03
Frequency Division Output Setting (Denominator)
Default: 1
Settings 1–255
Set the denominator for the frequency division of the PG card feedback and output. When you
set it to 2 with feedback 1024 ppr, PG OUT (pulse output) of PG card is 1024 ÷ 2 = 512 ppr.
 Loading...
Loading...



