Chapter 12 Description of Parameter SettingsME300
12.1-01-10
When setting to 1 or 2, the second and third voltage frequency settings are invalid.
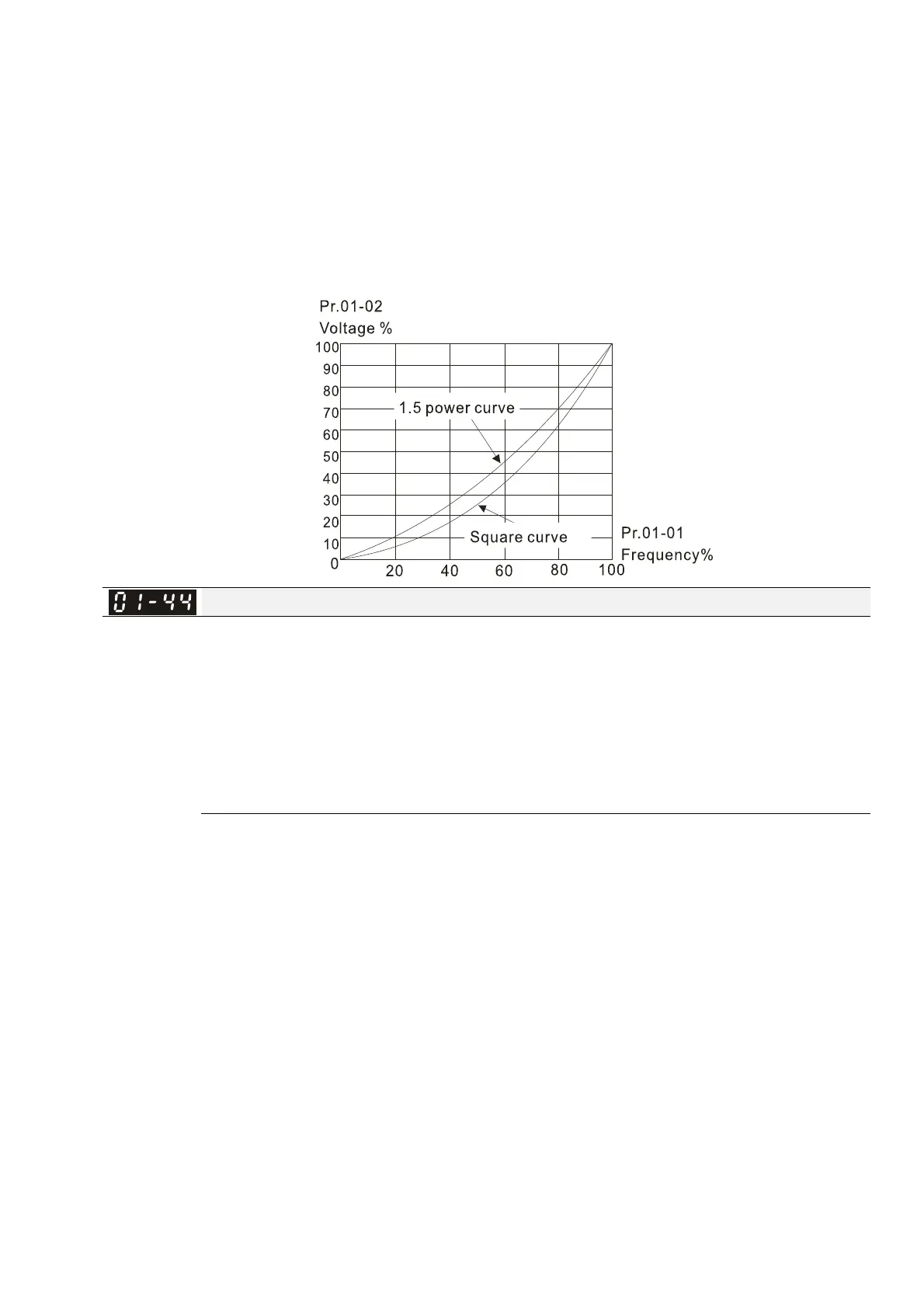
If the load on the motor is a variable torque load (torque is in direct proportion to rotating speed,
such as the load of a fan or a pump), the load torque is low at low rotating speed. Decreasing the
input voltage to make the magnetic field of the input current smaller and reduce flux loss and iron
loss for the motor to increase efficiency.
When you set the V/F curve to high power, it has lower torque at low frequency, and the drive is
not suitable for rapid acceleration and deceleration. Do NOT use this parameter for rapid
acceleration and deceleration.
Auto-Acceleration and Auto-Deceleration Setting
Default: 0
Settings 0: Linear acceleration and linear deceleration
1: Auto-acceleration and linear deceleration
2: Linear acceleration and auto-deceleration
3: Auto-acceleration and auto-deceleration
4: Stall prevention by auto-acceleration and auto-deceleration
(limited by Pr.01-12–01-21)
0 (linear acceleration and linear deceleration): the drive accelerates and decelerates according to
the setting for Pr.01-12–01-19.
1 or 2 (auto/linear acceleration and auto/linear deceleration): the drive reduces the mechanical
vibration and prevents the complicated auto-tuning processes. It does not stall during
acceleration and has no need for a brake resistor. It can also improve operation efficiency and
save energy.
3 (auto-acceleration and auto-deceleration): the drive auto-detects the load torque and
accelerates from the fastest acceleration time and smoothest start current to the setting
frequency. When decelerating, the drive auto-detects the load re-generation and stops the motor
smoothly with the fastest deceleration time.
4 (stall prevention by auto-acceleration and auto-deceleration (limited by Pr.01-12–01-21)): if the
acceleration and deceleration is within a reasonable range, the drive accelerates and
decelerates according to Pr.01-12–01-19. If the acceleration and deceleration time is too short,
the actual acceleration and deceleration time are greater than the acceleration and deceleration
time settings.
 Loading...
Loading...
