• Plug and play
- Connect Integrated electric gripper drive wires to power supply and host controller,
to begin using.
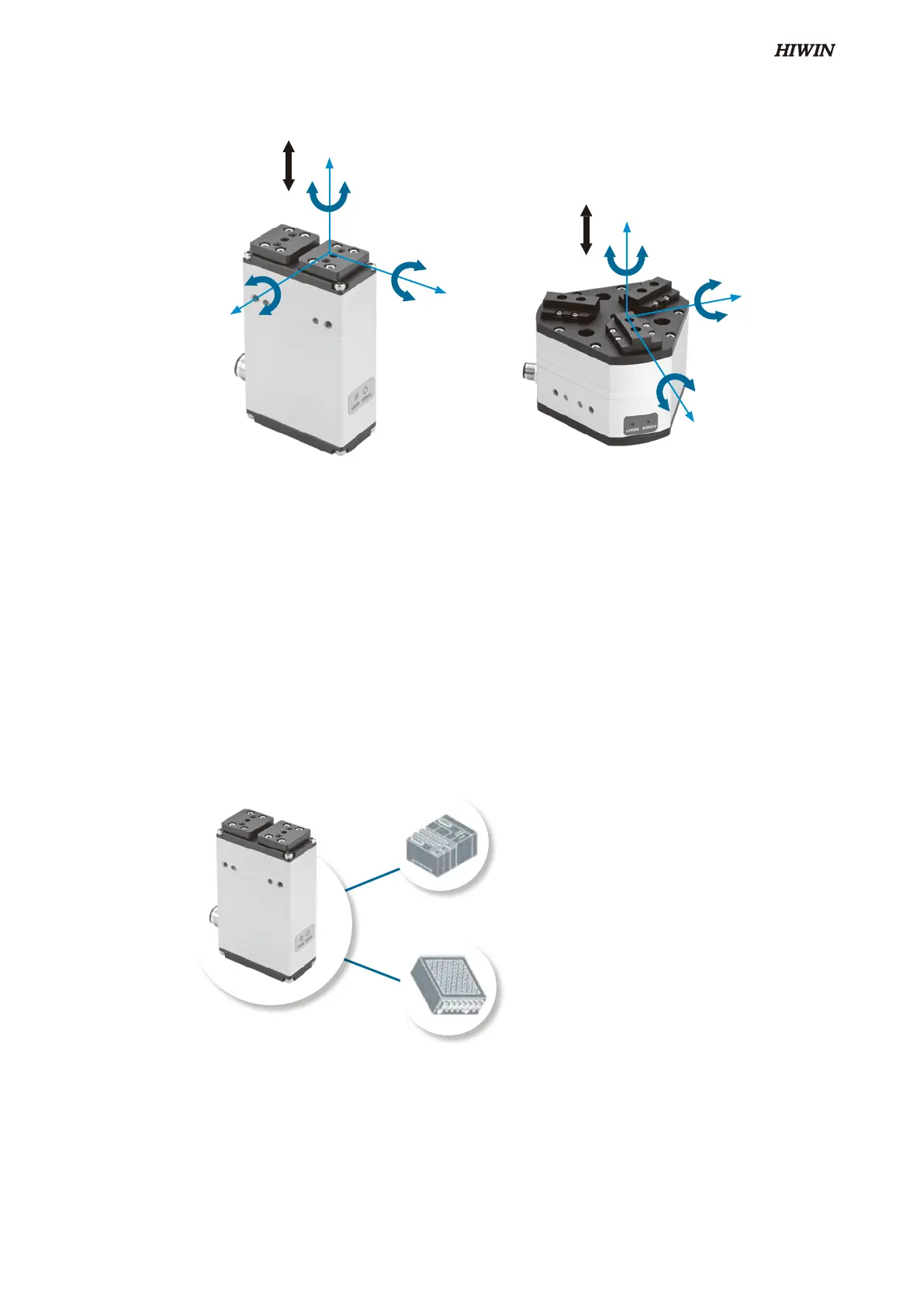
X
X
Y
Y
Z
Z
F
F
Mr
Mr
Mp
Mp
My
My
2.4 System architecture diagram
Upper controller
For example:
programmable logic controller PLC
robot controller RC
24V DC power supply
[Note 1] This gripping force is measured at a gripping point (L) of 20mm with a gripping force accuracy of ±25%.
[Note 2] This gripping force is measured at a gripping point (L) of 20mm with a gripping force accuracy of ±30%.
[Note 3] Moving velocity is 45mm/s.
[Description 1] Gripping force is recommended to be 10 to 20 times the weight of gripped object.
[Description 2] High-speed movement or rotation after gripping requires the weight of object to be reduced.
[Description 3] Material, shape, grip area, etc. of gripping part will affect the maximum weight of gripped object, and the
gripping part required to be installed before gripping.
[Description 4] SEG-04 is light gripping force model, it is recommended to use elastic material for gripping part, such as
rubber, gifted glue, etc., to increase gripping friction, and avoid gripping objects from falling. For more
details, please refer to ch6.4 design guide of gripping section.
[Description 5] SEG-04 can only inside grip inside and the backlash is 0.5mm per side. Don’t grip at the backlash area.
C11UE01-1907
7
 Loading...
Loading...
