MICROPROCESSOR-BASED/DDC FUNDAMENTALS
143
ENGINEERING MANUAL OF AUTOMATIC CONTROL
PROGRAMMING CATEGORIES
Programming of microcomputer-based controllers can be
subdivided into four discrete categories:
1. Configuration programming.
2. System initialization programming.
3. Data file programming.
4. Custom control programming.
Some controllers require all four levels of program entry while
other controllers, used for standardized applications, require
fewer levels.
CONFIGURATION PROGRAMMING
Configuration programming consists of selecting which
preprogrammed control sequence to use. It requires the
selection of hardware and/or software packages to match the
application requirements. Configuration programming can be
as simple as selecting a specific controller model that matches
the specific application requirements, or it can require keyboard
selection of the proper software options in a more complex
controller. Universal type controllers, typically applied as zone-
level controllers for VAV or other terminal units, are usually
preprogrammed with several control sequences resident in
memory. In these cases, configuration programming requires
selecting the proper control sequence to match the application
through device strapping or keyboard code entry.
SYSTEM INITIALIZATION PROGRAMMING
System initialization programming consists of entering
appropriate startup values using a keypad or a keyboard. Startup
data parameters include setpoint, throttling range, gain, reset
time, time of day, occupancy time, and night setback
temperature. These data are equivalent to the settings on a
mechanical control system, but there are usually more items
because of the added functionality of the digital control system.
DATA FILE PROGRAMMING
Data file programming may or may not be required
depending on whether the controller is a fixed-function or
variable-function device. Zone-level controllers are typically
fixed function since the applications and control sequences
are generally standardized. In these controllers, the input
terminals are dedicated to a specific sensor type and range,
and the output terminals are dedicated to a control relay or
specific type of actuator. The need for data files is minimized.
The processor always knows what to look for as it scans those
points, and it knows how to process the data.
System-level controllers are variable-function and are more
universal in application. These controllers must be able to
perform a wide variety of control sequences with a broad range
of sensor input types and control output signals. System-level
controllers require more extensive data file programming. For
the controller to properly process input data, for example, it
must know if the point type is analog or digital. If the point is
analog, the controller must know the sensor type, the range,
whether or not the input value is linear, whether or not alarm
limits are assigned, what the high and low alarm limit values
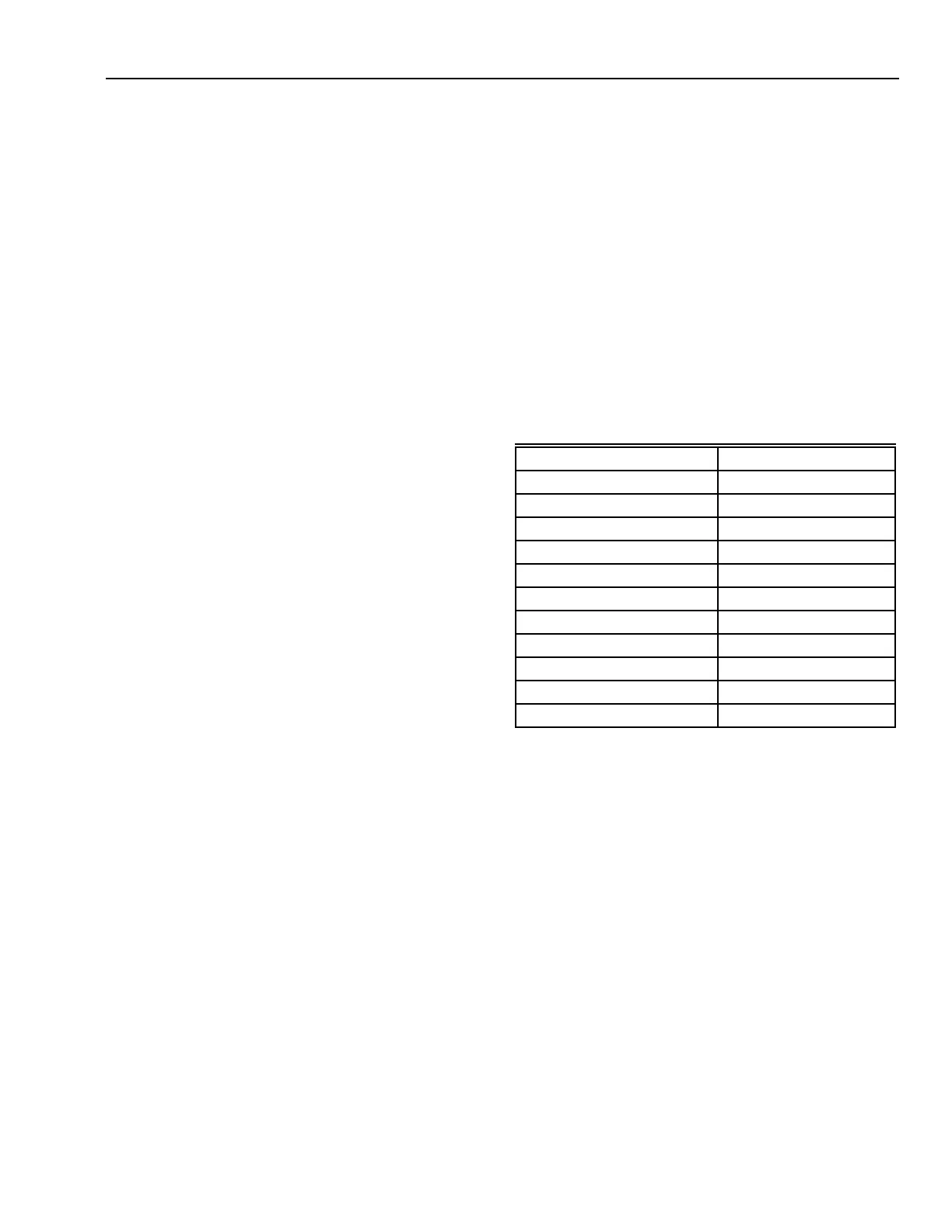
are if limits are assigned, and if there is a lockout point. See
Table 2. If the point is digital, the controller must know its
normal state (open or closed), whether the given state is an
alarm state or merely a status condition, and whether or not
the condition triggers an event-initiated program.
Table 2. Typical Data File for Analog Input.
Point Address User Address
Point type Regular or calculation
Sensor Platinum (0 to 100F)
Physical terminal assigned 16
Use code Cold deck dry bulb
Engineering unit F
Decimal places for display XXX.X
High limit 70.0
Low limit 40.0
Alarm lockout point Point address
Point descriptor Cold deck temperature
Alarm priority Critical
CUSTOM CONTROL PROGRAMMING
Custom control programming is the most involved
programming category. Custom control programming requires
a step-by-step procedure that closely resembles standard
computer programming. A macro view of the basic tasks is
shown in Figure 13.
 Loading...
Loading...



