8 Pulse Output Units
8 - 28
NX-series Position Interface Units User’s Manual (W524)
The type of controller that is connected affects the I/O refreshing method, parameter settings, data
access methods, and supported functions.
This section describes this information for various controllers.
When you use an NJ/NX-series Controller with the MC Function Module, you must set the Unit as an
servo axis. Set the axis parameter settings and assign an axis variable from the Sysmac Studio.
Even though the setting is for a servo axis, you can also use it for a stepper motor.
Refer to the NJ/NX-series CPU Unit Motion Control User’s Manual (Cat. No. W507) for detailed setting
procedures.
Observe the following precautions when you use a Pulse Output Unit with the MC Function Module.
• Connect the Pulse Output Unit after an EtherCAT Coupler Unit.
• The Unit is treated as an axis (servo axis) from the user program, so you cannot handle the I/O data
from the Pulse Output Unit directly. The Unit is handled as an axis variable.
• For an NX-series CPU Unit, you can execute motion control in the primary periodic task and priority-5
periodic task.
• You cannot control the error inputs, positioning completion inputs, RUN outputs, and error reset out-
puts with instructions for the MC Function Module, such as the MC_Power or MC_Reset instructions.
Set these inputs and outputs as I/O Unit signals and control operations to save inputs, output
sequencing, and other operations from the user program.
Yes: Can be used, Partial: Can be used with restrictions, No: Cannot be used
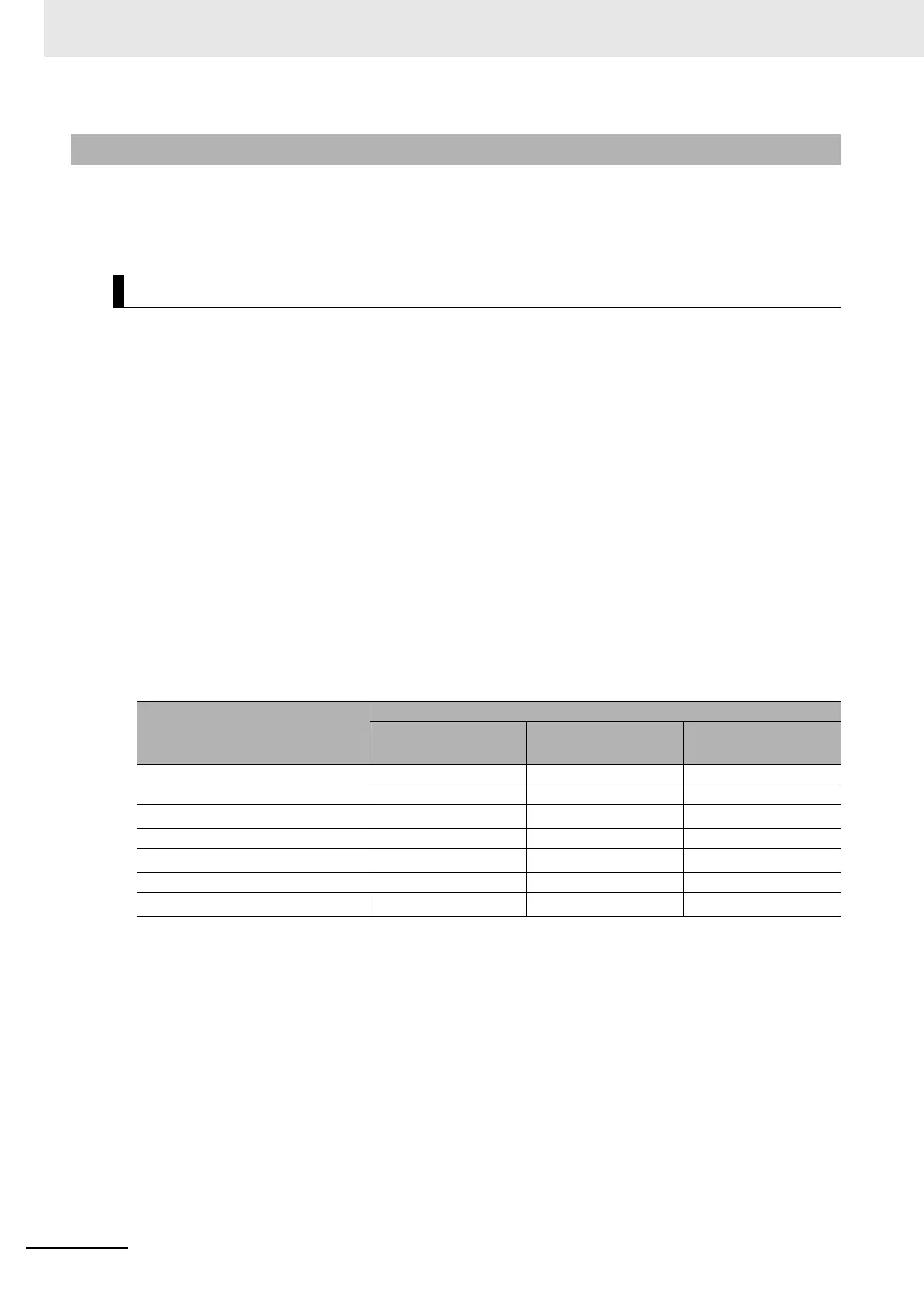
8-7-4 Differences in I/O Refreshing Methods Based on the Controller
Using an NJ/NX-series Controller with the MC Function Module
Function
EtherCAT Coupler Unit
Free-Run refreshing
*1
*1. If you use the Unit as an axis in the MC Function Module, either synchronous I/O refreshing or task period pri-
oritized refreshing is used as the I/O refreshing method.
Synchronous I/O
refreshing
Task period priori-
tized refreshing
*2
*2. Unit version 1.2 or later and an NX-ECC203 EtherCAT Coupler Unit are required.
Pulse output method No Yes Yes
Output mode selection No Yes Yes
External output No
Partial
*3
*3. If the Unit is used as an MC Function Module axis, only automatic output of the error counter reset output based
on the latch function can be performed.
Partial
*3
Latching No Yes Yes
External input function selection No
Partial
*4
*4. There are restrictions in the use of the Unit as an axis for the MC Function Module. These restrictions include
that you must set the External Input Function Selection parameter for external input 0 to latch input 1 and you
must connect external input 0 to the home input signal for homing. Refer to 8-10-6 External Input Function Se-
lection on page 8-65 for information on external input signals.
Partial
*4
Load rejection output setting No Yes Yes
I/O refreshing method setting No
Partial
*1
Partial
*1
 Loading...
Loading...



