9 - 13
9 Application Example
NX-series Position Interface Units User’s Manual (W524)
9-4 Programming Examples
9
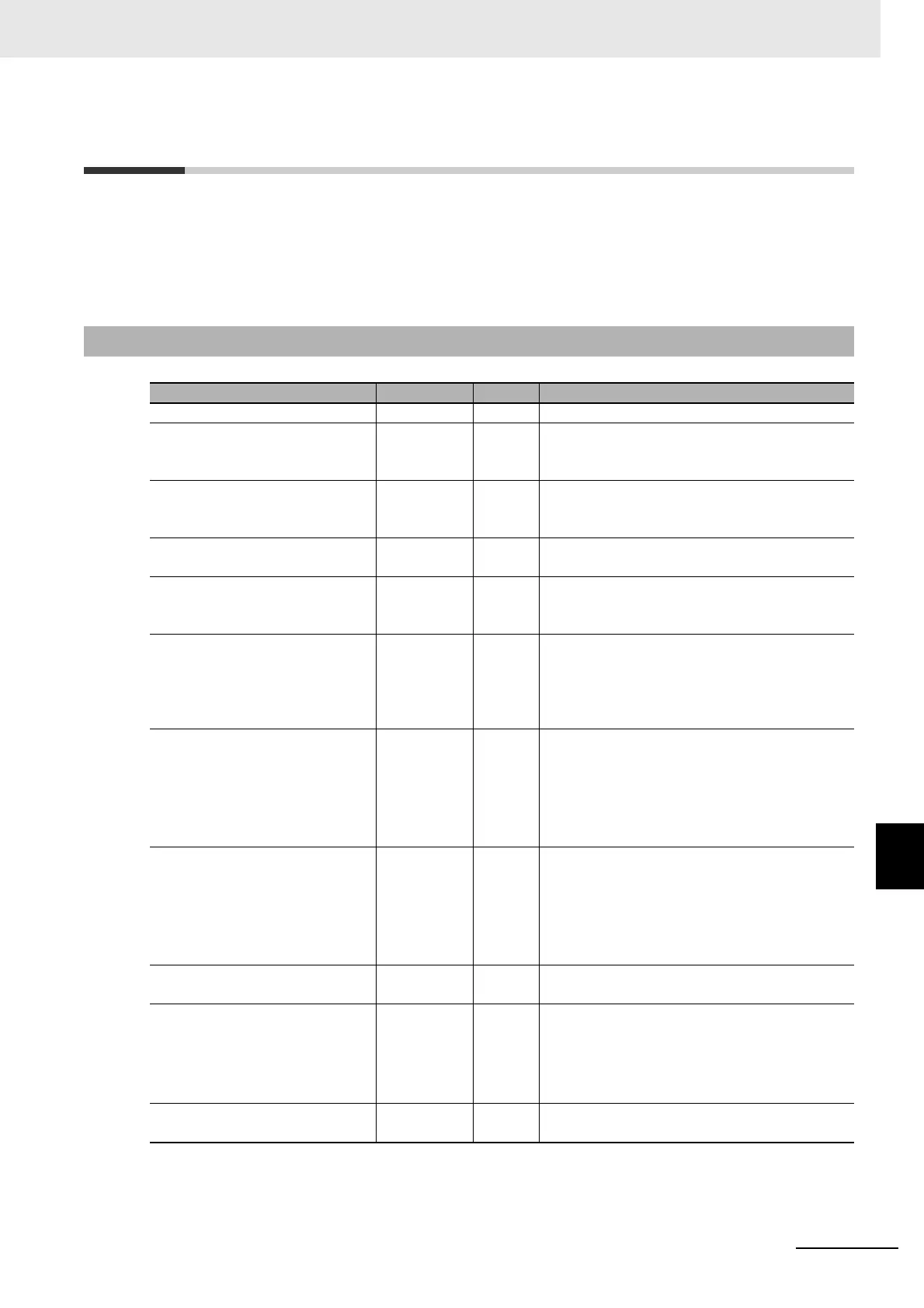
9-4-1 Main Variables Used in Programming Example
9-4 Programming Examples
This example shows the basic programming for relative positioning.
Interlocks with other devices and programming are omitted from this example.
For other sample programming for the MC Function Module, refer to the NJ/NX-series CPU Unit Motion
Control User’s Manual (Cat. No. W507).
9-4-1 Main Variables Used in Programming Example
Name Data type Default Comments
MC_Axis000 _sAXIS_REF --- Axis variable for axis 0.
MC_Axis000.Cfg.NodeAddress UINT --- This is the node address of the EtherCAT Cou-
pler Unit under which the Position Interface Unit
that is assigned to axis 0 is connected.
_EC_PDSlavTbl[N] BOOL FALSE TRUE when EtherCAT process data communica-
tions for node address N are enabled (Opera-
tional).
_EC_CommErrTbl[N] BOOL FALSE TRUE when a communications error has
occurred in the slave with node address N.
StartPg BOOL FALSE When this variable is TRUE, the Servo is turned
ON if EtherCAT process data communications
are active and normal.
MoveStart BOOL FALSE This is the command to execute relative position-
ing. If this variable changes to TRUE when the
Servo is ON, the execution condition (Start0) for
the MC_MoveRelative instruction changes to
TRUE.
RunOutput BOOL FALSE This is the Run output device variable to the
Servo Drive.
In this example, this variable is connected to the
Status output from the PWR instance of the
MC_Power instruction. It changes to TRUE when
the Servo turns ON.
ResetOn BOOL FALSE This variable gives the status of the external but-
ton that is used to reset errors.
If this variable is TRUE, the error reset output
(ResetDrvErr) to the Servo Drive turns ON and
the error in the MC Function Module is reset by
the MC_Reset instruction.
InPosition BOOL FALSE This is the positioning completion input device
variable from the Servo Drive.
DrvErrInput BOOL FALSE This is the error input device variable from the
Servo Drive.
When this variable is TRUE, an immediate stop
is performed by the MC_ImmediateStop instruc-
tion.
ResetDrvErr BOOL FALSE This is the error reset output device variable to
the Servo Drive.
 Loading...
Loading...



