8 - 43
8 Pulse Output Units
NX-series Position Interface Units User’s Manual (W524)
8-9 Setting Methods
8
8-9-2 Precautions When Using the Pulse Output Unit
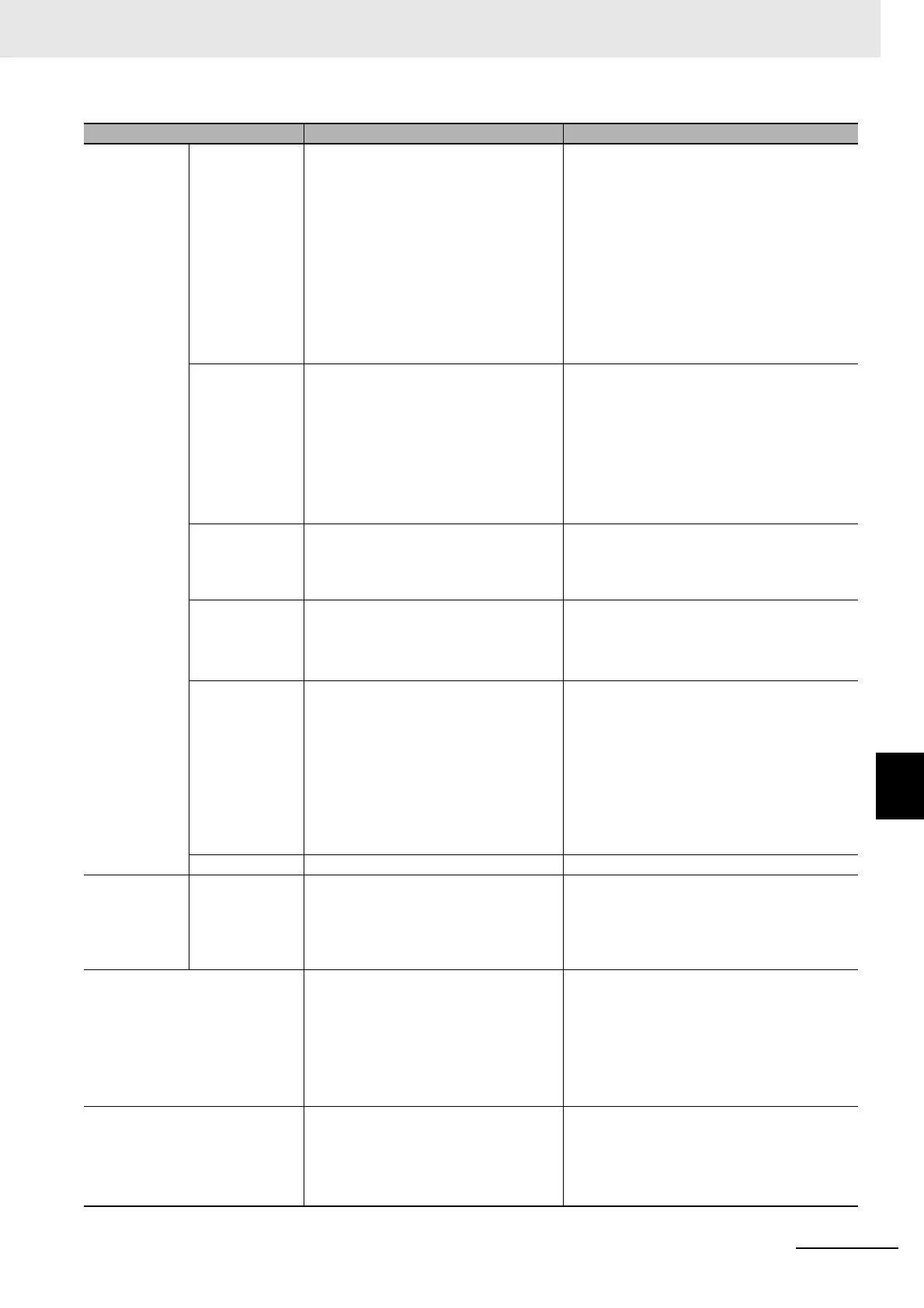
Auxiliary func-
tion for sin-
gle-axis
control
Resetting axis
errors
*3
Clears the Drive error status for all Drive
errors that are resettable.
When a Servo Drive error occurs, you
can use the MC Function Module to
detect the error and report it as an axis
error.
Clears the error status for all Pulse Output
Unit errors that are resettable.
This function cannot clear the error status of
the motor drive that is connected to a Pulse
Output Unit.
You also cannot use the MC Function Module
to detect errors that occur in the Servo Drive.
Instead, use a separate digital input and out-
put for the error output and error reset input
on the Servo Drive, and perform this control
from the user program.
Homing The input that is built into the Servo
Drive is used to perform homing based
on the positions of the signals.
You can also use holding to perform
homing.
A Digital Input Unit is added and axis func-
tions are assigned to perform homing based
on the positions of the signals.
For the home input, you must select to use an
external home input in the motion control
parameters.
You cannot also use holding to perform hom-
ing.
Enabling exter-
nal latches
The Servo Drive’s latch function and the
interrupt input (latch input) that is built
into the Servo Drive are used to latch
the present position.
The Pulse Output Unit’s latch function and the
interrupt input (latch input) that is built into the
Unit are used to latch the present position.
Monitoring axis
following error
The processing for this function is per-
formed by the MC Function Module.
Same as at the left.
However, this function is not effective in the
Pulse Output Unit because the command
position equals the actual current position.
Following error
counter reset
The accumulated following error in the
Servo Drive is reset.
*4
The following status is reset: when the com-
mand current position in the Pulse Output
Unit does not match the actual current posi-
tion when an operation is stopped during
Pulse Output Unit processing or due to pulse
unit rounding error.
This function cannot reset the accumulated
following error in the motor drive that is con-
nected to a Pulse Output Unit.
Torque limit The specified torque limit is set. Cannot be used.
Auxiliary func-
tions for
multi-axes
coordinated
control
Resetting axes
group errors
Refer to Resetting axis errors under
Auxiliary function for single-axis control.
Refer to Resetting axis errors under Auxiliary
function for single-axis control.
In-position check
*5
An in-position check is performed on the
motor position based on the command
position and position actual value.
You cannot perform an in-position check for
the motor drive that is connected to a Pulse
Output Unit.
Use a separate Digital Input Unit to receive
the in-position output from the Servo Drive
and perform an in-position check of the motor
position in the user program.
Stopping mode selection In addition to immediately stopping the
command value, you can also select to
reset the following error counter and
turn OFF the Servo.
Only an immediate stop of the command
value is performed.
You cannot reset the following error counter
or turn OFF the Servo for the motor drive that
is connected to a Pulse Output Unit.
Function When using a G5-series Servo Drive When Using a Pulse Output Unit
 Loading...
Loading...



