Chapter 4
4-18
Operation
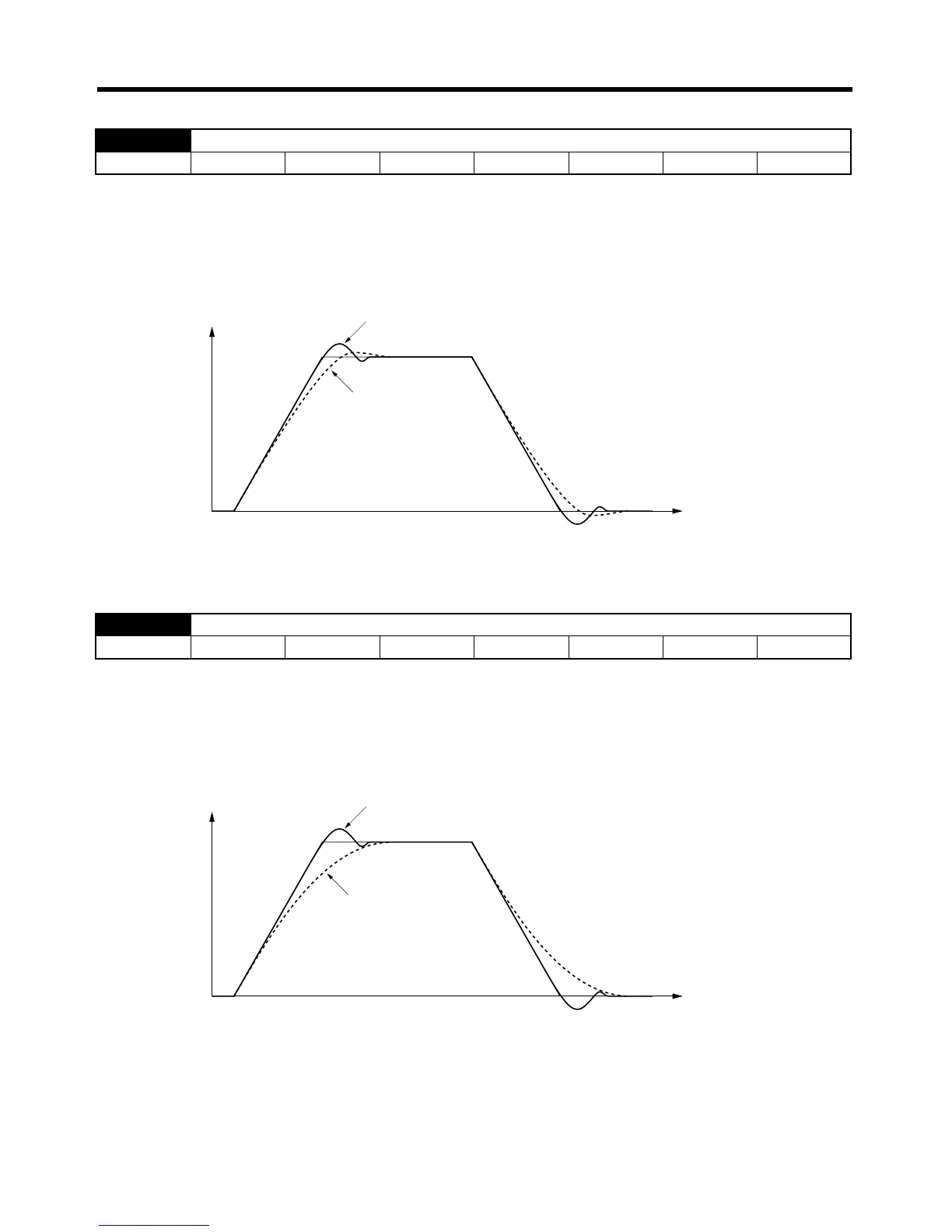
• This gain adjusts the speed loop response.
• Increase the setting (i.e., increase the gain) to increase servo rigidity. Generally, the greater the
inertia ratio, the higher the setting. There is a risk of vibration, however, if the gain is too high.
When the speed loop gain is manipulated, the response will change as shown in the following dia-
gram.
Note This parameter is enabled only if the gain adjustment rotary switch is set to 0.
• Sets the speed loop integral time constant.
• The higher the setting, the lower the response, and the lower the resilience to external force. There
is a risk of vibration if the setting is too low.
When the speed loop integral time constant is manipulated, the response changes as shown in the
following diagram.
Note This parameter is enabled only if the gain adjustment rotary switch has been set to 0.
Pn100 Speed loop gain
Settings 1 to 2000 Unit Hz Default 80 Restart? ---
Pn101 Speed loop integral time constant
Settings 15 to 51200 Unit
×0.01 ms Default 2000 Restart? ---
Servomotor speed
Time
Overshoots when speed loop gain is high. (Vibrates when gain is too high.)
When speed loop gain is low.
Servomotor speed
Time
Overshoots when speed loop integration constant is short.
When speed loop integration
constant is long.
 Loading...
Loading...








