Appendix
COMPAX-M/S
Hand-held terminal
210
Status monitor S15
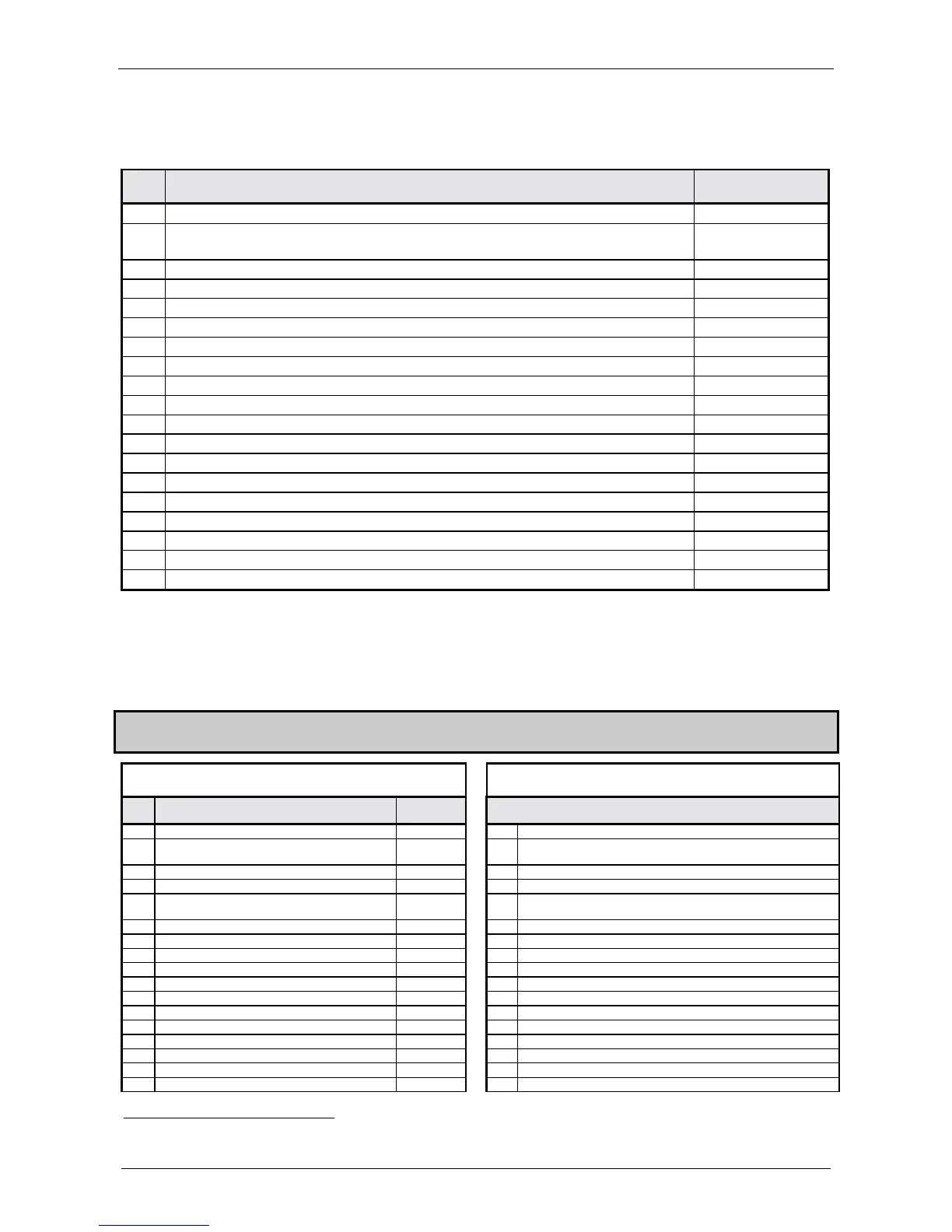
You can assign the values of the service D/A monitor to status S15 using parameter P182.
Selection of status value using P182
P182 Measuring parameter
Reference
parameter
0 Nominal speed value sensor 20 000 min
-1
1 Tracking error 128 motor
revolutions
2 Advance speed control 20 000 min
-1
3 Nominal speed value of position controller 20 000 min
-1
4 Actual speed value 20 000 min
-1
5 Loop difference for speed 20 000 min
-1
6 Not assigned
7 Not assigned
8 Nominal value of transverse current (torque)
43
200A
9 Intermediate circuit voltage 1000V
10 Sine for co-ordinate transformation
11 Voltage positioning signal for phase U
12 Voltage positioning signal for phase V
13 Phase current for phase U 200A
14 Phase current for phase V 200A
15 Actual value of transverse current (torque)
44
200A
16 Longitudinal current 200A
17 Scaled transverse voltgage (For amplification 1 use: 10V = 2 * U
LS
) 2 * U
LS
18 Scaled longitudinal voltage (For amplification 1 use: 10V = 2 * U
LS
) 2 * U
LS
The reference parameter corresponds to value 1.
Note concerning status monitor S15
Scaling status monitor S15:
S15 does not have the same scaling as S13/S14.
For S15 use: S15=1 for the reference value which is given for the D/A monitor.
10.2 Additional COMPAX measuring quantites
D/A monitor channels 0 ... 3
Status monitor S15 (P182); HEDA
Signal indicators (optimization display) S13 / S14
(P233/P234)
Selec-
tion
Measuring quantity Reference
value
Selec
tion
Meaning
0 Nominal speed value sensor 20 000 min
-1
1 Tracking error
128 motor
revolutions
1 Positioning time (from start of positioning to "Position reached")
2 Advance speed control 20 000 min
-
5 max. position overshoot [units corresp. P90] (amount)
6 Not assigned 6 max. position undershoot [units corresp. P90] (amount)
7 Speed controller output (nominal current value) 200A 7 max. acceleration lag error [units corresp. P90]
8 Nominal value of transverse current (torque) 200A 8 max. braking lag error [units corresp. P90]
9 Intermediate circuit voltage 1000V 9 Max. acceleration speed in [%] of the nominal motor speed
10 Sine for co-ordinate transformation 10 max. braking speed in [%] of motor nominal speed
11 Voltage positioning signal for phase U 2 * ULS 11 max. acceleration current in [%] of motor nominal current
12 Voltage positioning signal for phase V 2 * ULS 12 max. braking current in [%] of motor nominal current
13 Phase current for phase U 200A 13 max. time in current limit during acceleration, in [ms]
14 Phase current for phase V 200A 14 max. time in current limit during braking, in [ms]
15 Actual value of transverse current (torque) 200A 15 Current number of HEDA transmission errors
16 Longitudinal current 200A 16 Average no. of HEDA transmission errors per second
43
To determine torque: torque = 3 * transverse current * 0.71 * torque constant
44
To determine torque: torque = 3 * transverse current * 0.71 * torque constant

 Loading...
Loading...








