R8C/1A Group, R8C/1B Group 17. A/D Converter
Rev.1.30 Dec 08, 2006 Page 243 of 315
REJ09B0252-0130
17.7 Output Impedance of Sensor under A/D Conversion
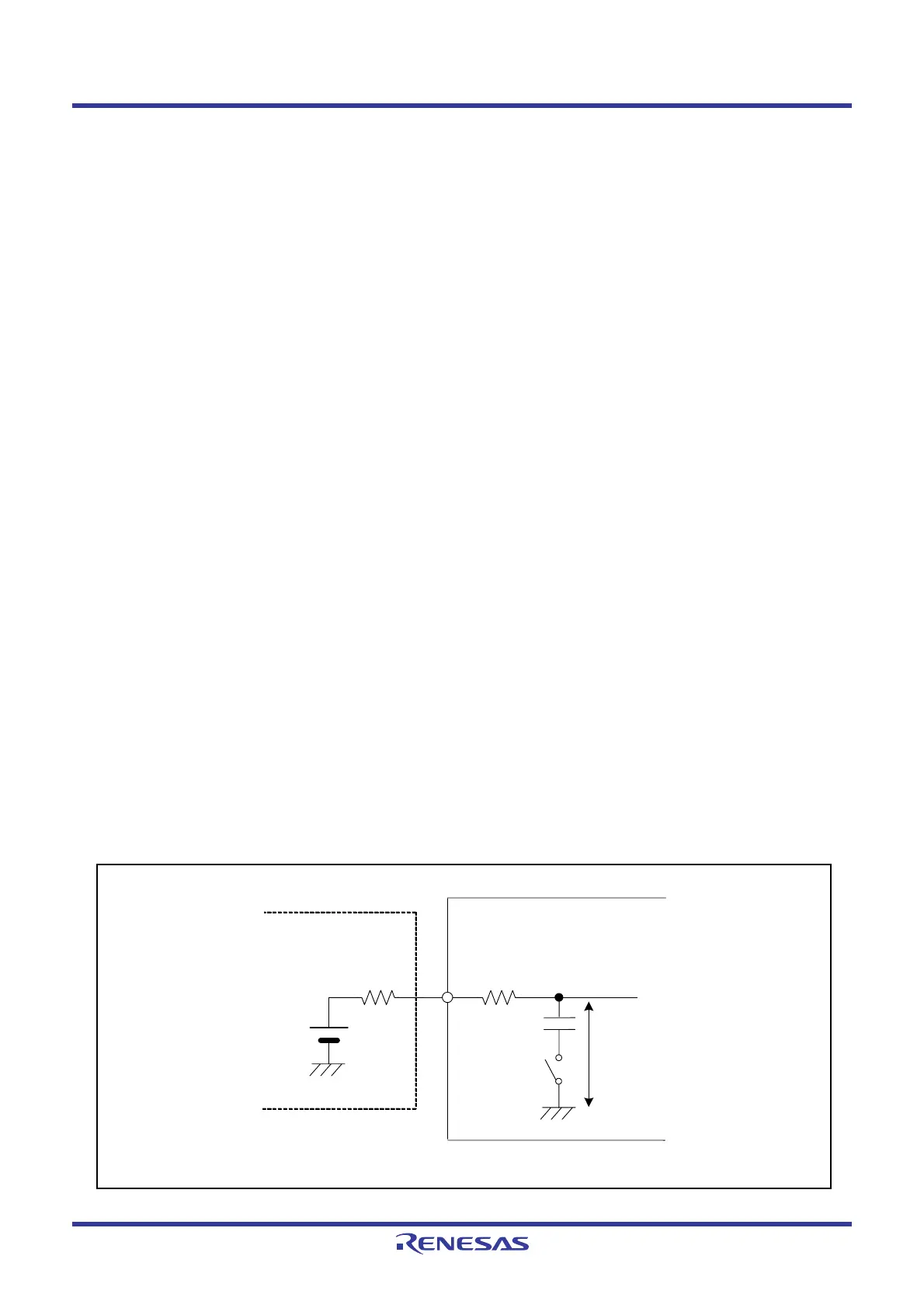
To carry out A/D conversion properly, charging the internal capacitor C shown in Figure 17.11 has to be completed
within a specified period of time. T (sampling time) as the specified time. Let output impedance of sensor
equivalent circuit be R0, internal resistance of microcomputer be R, precision (error) of the A/D converter be X,
and the resolution of A/D converter be Y (Y is 1024 in the 10-bit mode, and 256 in the 8-bit mode).
VC is generally
And when t = T,
Hence,
Figure 17.11 shows Analog Input Pin and External Sensor Equivalent Circuit. When the difference between VIN
and VC becomes 0.1LSB, we find impedance R0 when voltage between pins VC changes from 0 to VIN-(0.1/
1024) VIN in time T. (0.1/1024) means that A/D precision drop due to insufficient capacitor charge is held to
0.1LSB at time of A/D conversion in the 10-bit mode. Actual error however is the value of absolute precision
added to 0.1LSB.
When f(XIN) = 10 MHz, T = 0.25 µs in the A/D conversion mode without sample & hold. Output impedance R0
for sufficiently charging capacitor C within time T is determined as follows.
T = 0.25 µs, R = 2.8 kΩ, C = 6.0 pF, X = 0.1, and Y = 1024. Hence,
Thus, the allowable output impedance of the sensor equivalent circuit, making the precision (error) 0.1LSB or less,
is approximately 1.7 kΩ. maximum.
Figure 17.11 Analog Input Pin and External Sensor Equivalent Circuit
R0
R (2.8 kΩ)
C (6.0 pF)
VIN
VC
MCU
Sensor equivalent
circuit
NOTE:
1. The capasity of the terminal is assumed to be 4.5 pF.
R0
0.25 10
6–
×
6.0 10
12–
0.1
1024
------------ln•×
---------------------------------------------------–2.8
3
×10 1.7
3
×10≈–=
R0
T
C
X
Y
----ln•
-------------------–R–=
1
CR0 R+()
--------------------------–T
X
Y
----ln=
e
1
CR0 R+()
-------------------------- T–
X
Y
----=
VC VIN
X
Y
---- VIN VIN 1
X
Y
----–
=–=
VC VIN
1
e
1
CR0 R+()
--------------------------– t
–
=
 Loading...
Loading...