E6581581
- 37 -
5.1.1. Instance 20: CIP basic speed control output
Instance 20 mapping
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 - - - - - Fault reset -
Run
forward
1 -
2
Drive Speed Reference min
-1
(Low byte) *
3
Drive Speed Reference min
-1
(High byte) *
5.1.2. Instance 70: CIP basic speed control input
Instance 70 mapping
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 - - - - -
Running
forward
- Faulted
1 -
2
Drive Actual Speed min
-1
(Low byte)
3
Drive Actual Speed min
-1
(High byte)
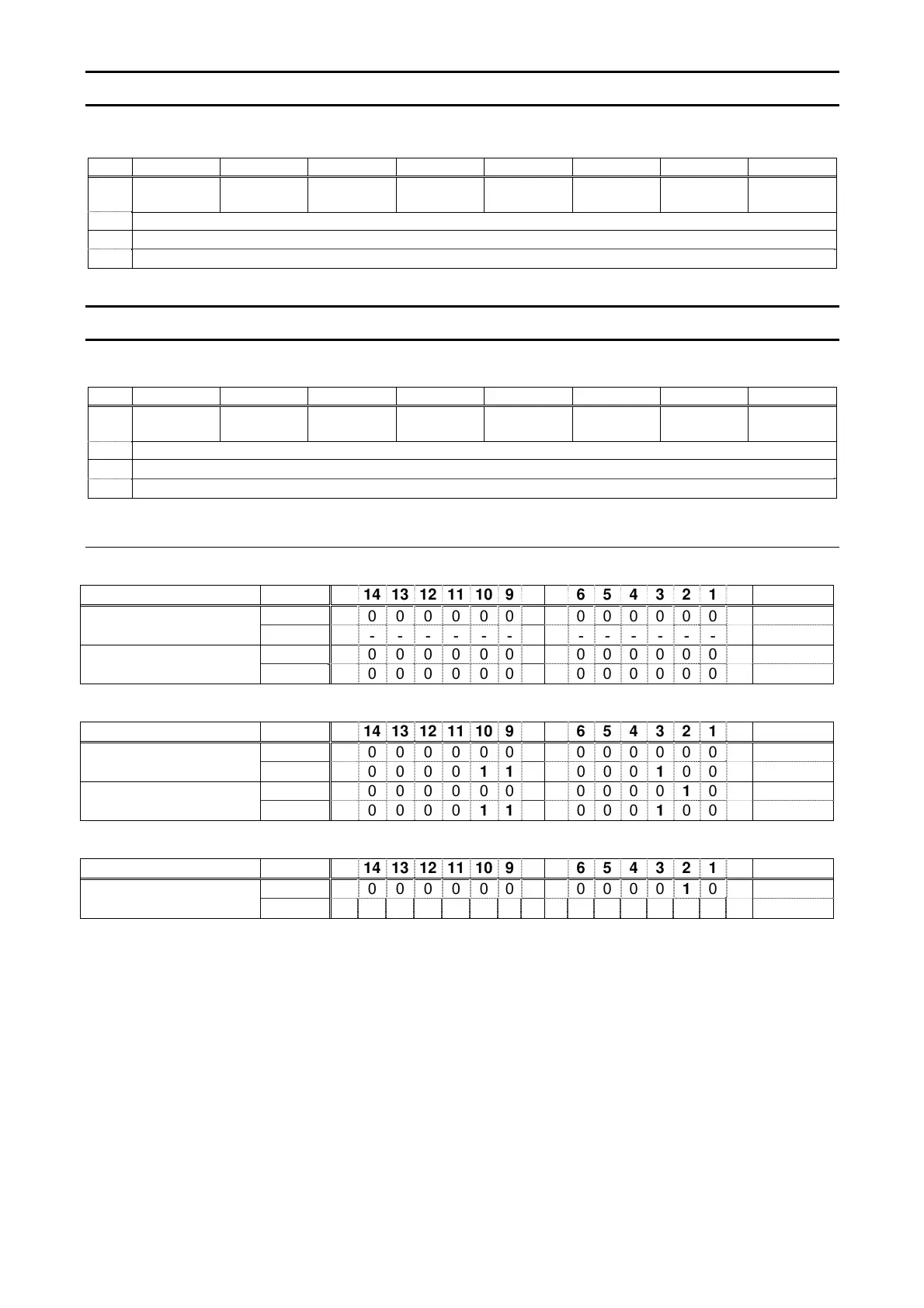
Examples of Instance 20/70
(1) Stop
Instance Byte 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 Hex.
1, 0 0 0 00000000000 0 0 0 0x0000
Output Instance 20
3, 2 - - ----------- - - - -
1, 0 0 0 00000000000 0 0 0 0x0000
Input Instance 70
3, 2 0 0 00000000000 0 0 0 0x0000
(2) Forward running 1800min-1
Instance Byte 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 Hex.
1, 0 0 0 00000000000 0 0 1 0x0001
Output Instance 20
3, 2 0 0 0 0 0 11100001 0 0 0 0x0708
1, 0 0 0 00000000000 1 0 0 0x0004
Input Instance 70
3, 2 0 0 0 0 0 11100001 0 0 0 0x0708
(3) Fault reset **
Instance Byte 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 Hex.
1, 0 0 0 00000000000 1 0 0 0x0004
Output Instance 20
3, 2 - - ----------- - - - -
*
Drive Reference Speed is set up number of rotations by the hexadecimal number.
For example, when "Frequency reference" is set up to 1800min
-1
:
1800 = 0x0708 (Hex.)
** Fault reset works only 1 time when 0 -> 1.
 Loading...
Loading...









