b. Re-enable the robotic arm: motion_enable(true)
c. Set the motion state: set_state(0)
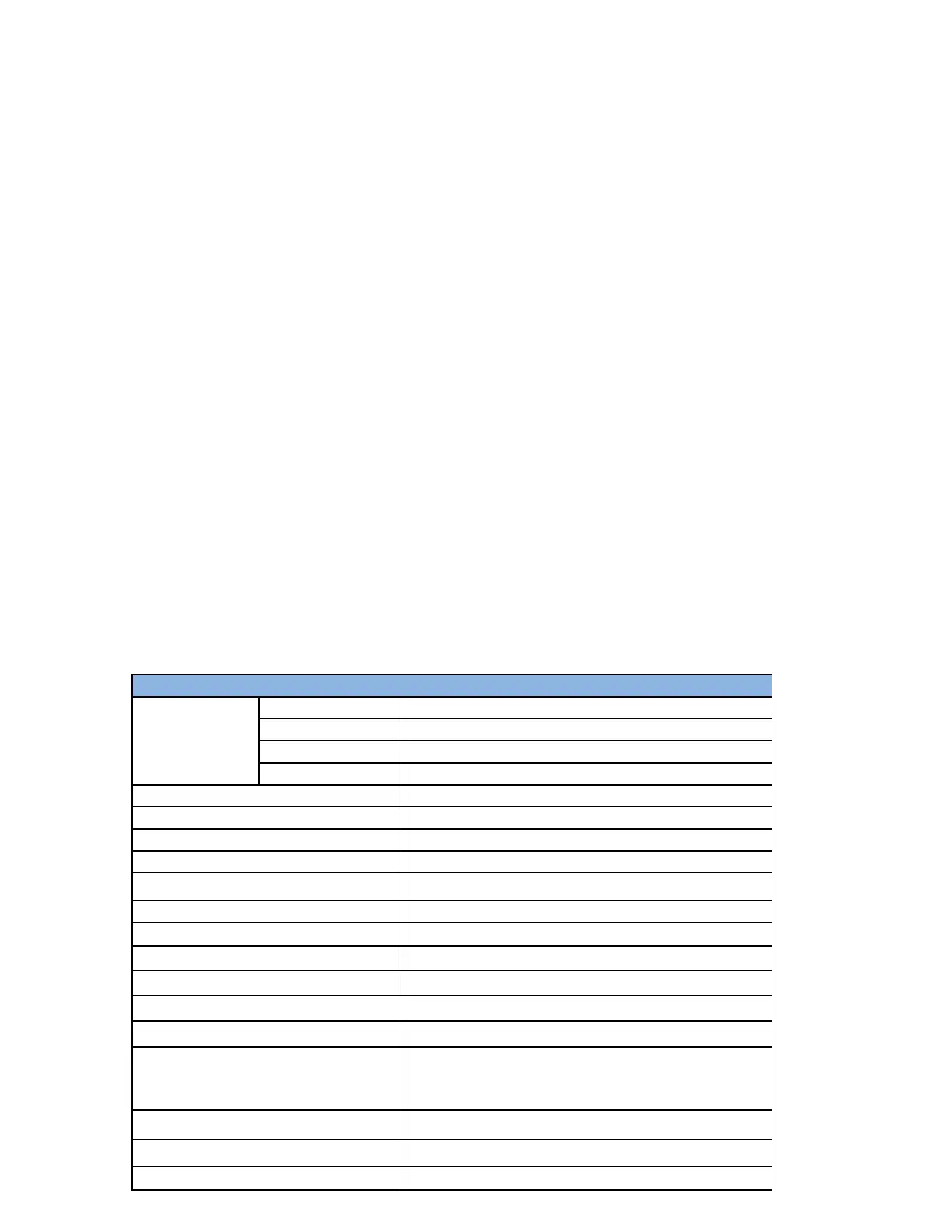
Appendix2-Technical Specifications
1.1 Lite 6 Specifications
Max Speed of End-effector
*Ambient Temperature Range
UFACTORY Studio/Python/C++/ROS
Robotic Arm Communication Protocol
End-effector I/O Interface
2 Digital inputs, 2 Digital outputs,
2 Analog inputs
End-effector Communication Protocol
 Loading...
Loading...




